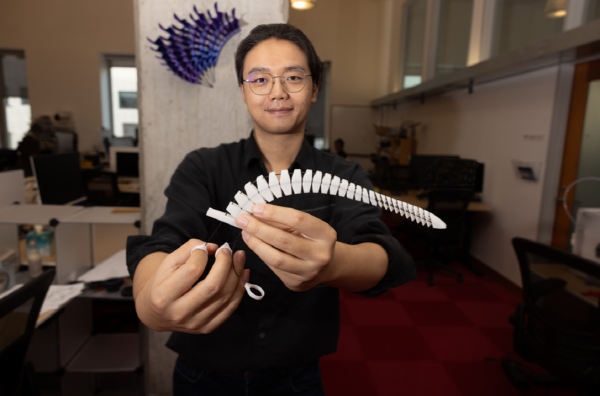
▲ '엑스스트링스' 방식을 활용하면 물체 주위를 감싸는 흰색 촉수, 도마뱀 로봇 등 다채롭고 독특한 물체를 다양하게 만들 수 있다(사진=MIT)
美 MIT 산하 ‘컴퓨터과학·인공지능연구소(CSAIL)’ 연구팀이 3D프린터로 제작할 수 있는 케이블 구동 메카니즘인 ‘엑스스트링스(Xstrings)’를 개발했다고 밝혔다.
부품 설계 도구이자 부품 제작 방법인 엑스스트링스는 3D 프린터를 활용해 비교적 쉽게 케이블 구동 장치를 제작할 수 있으며, 생체공학 로봇 조립, 설치 예술, 역동적인 패션 디자인을 작업 등에 활용 가능하다.
연구팀은 오는 4월 26일부터 5월 1일까지 일본 요코하마에서 열리는 ‘CHI 2025(2025 Conference on Human Factors in Computing Systems)’에서 논문을 발표할 예정이다.(논문 제목:Xstrings: 3D Printing Cable-driven Mechanism for Actuation, Deformation, and Manipulation)
이번 컨퍼런스에서 연구팀은 엑스스트링스를 사용해 빨간색 도마뱀 로봇, 공작의 꼬리처럼 여닫을 수 있는 보라색 물체, 물건을 휘어 잡을수 있는 흰색 촉수, 주먹처럼 말아올리면서 물체를 잡을 수 있는 흰색 발톱 등 다채롭고 독특한 물체를 프린팅해 선보일 예정이다.
MIT CSAIL 박사후 연구원이자 논문 수석저자인 지아지 리(Jiaji Li)는 "엑스스트링스가 엔지니어의 시간과 에너지를 절약해 수작업 대비 총 생산 시간의 40%를 단축해준다"고 말했다. 또 “우리의 혁신적인 방법은 누구나 데스크톱 3D 프린터를 이용해 케이블 구동 제품을 설계하고 제작할 수 있도록 도와준다”라고 덧붙였다.

▲ '엑스스트링스'를 활용해 제작한 다양한 케이블 구동 방식 물체(사진=MIT)
사용자는 엑스스프링스 프로그램에 특정 치수를 입력한 후 구부리기, 코일링(스프링), 비틀기, 압축하기 등 '기본 요소'를 선택해 부품이 움직이는 방식과 동작의 각도를 선택할 수 있다. 더욱 정교한 물체를 만들려면 여러 가지 기본 요소를 통합해 흥미로운 모션 조합을 만들 수 있다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 美 테일러 팜즈, 농업용 로봇 기업 팜와이즈 인수 (3) | 2025.04.10 |
|---|---|
| 바퀴형 다리 로봇, 영국 택배 배송에 투입된다 (1) | 2025.04.10 |
| 美 서브 로보틱스, 댈러스서 자율배달로봇 서비스 개시 (1) | 2025.04.09 |
| 러시아, 군사 정찰용 '구형' 로봇 개발 중… 제작비 5만원대 (0) | 2025.04.09 |
| 유니트리 로봇, 중국 공항서 음악 공연과 순찰 임무 수행 (0) | 2025.04.09 |