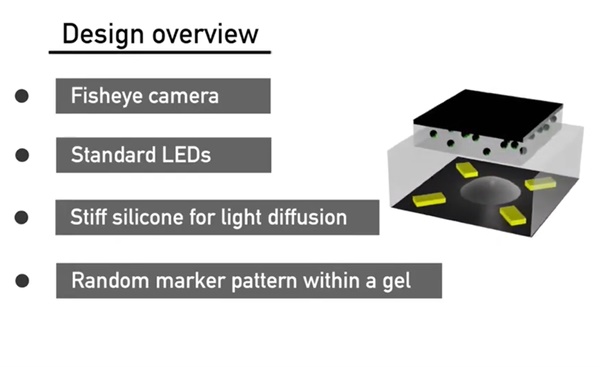
스위스 취리히 연방공대(ETHZ) 로봇 연구원들이 로봇도 인간처럼 연약하거나 미끄러운 물체의 감촉을 감지하고 힘을 조절해 물체를 집어들게 해 줄 촉각센서를 개발했다. ETHZ는 16일(현지시간) 이 대학 연구원들이 머신러닝(기계학습)을 통해 이같은 감촉을 가진 단순하게 설계된 촉각센서를 개발했다고 발표했다. 이 촉각센서는 ‘로봇 피부’ 개발을 향한 중요한 진전을 보이는 단계에 이른 것으로 평가받는다. 연구원들에 따르면 이 촉각센서 그리퍼(grippers)는 인간처럼 물체를 확실하게 잡았는지, 그것이 손가락 사이로 빠져나가려 하는지 느낄 수 있고 그에 따라 쥐는 강도를 조절할 수 있다. 로봇이 쉽게 부서지거나, 미끄럽거나, 표면이 복잡한 물체를 집어들 때엔 이 물체들의 힘에 대한 피드백을 받게 되는 방식이다. 이 센서의 구조를 보면, 맨 위에는 탄력성있는 실리콘 겔과 안에 들어있는 미세한 컬러 플라스틱 구슬(beads), 그 아래 빛 분산을 위한 딱딱한 실리콘, 그리고 맨 아래바닥 어안렌즈 카메라와 그 주변의 4개 표준 발광소자(LED)로 구성돼 있다.
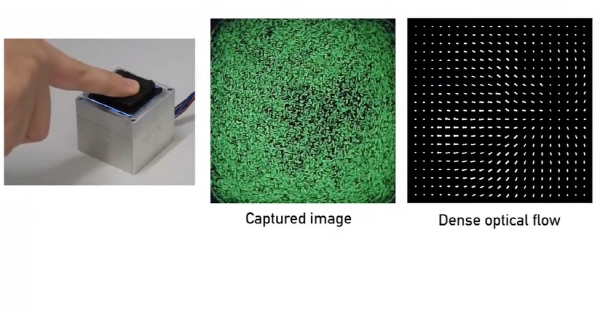
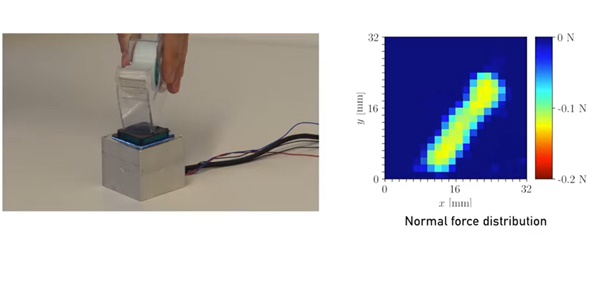
게다가 이 센서는 매우 단순한 디자인으로 돼 있어 생산비도 적게 든다. ◆온전히 광학입력 방식으로만 측정 이 센서는 시각센서(비전센서)에 기반을 두고 있다. 즉, 이 센서와 물체가 접촉하면 센서 상단의 실리콘으로 된 (센서)피부에 움푹 들어간 부분이 나타난다. 이는 미세한 구슬의 패턴을 바꾸게 되고 센서 하부에 있는 어안(魚眼)렌즈 카메라에 등록된다. 이 패턴의 변화로부터 센서의 힘 분포를 계산할 수 있다. 라파엘로 단드레아 ETHZ 동역학시스템 및 제어 학과 교수팀의 카를로 스페라자 박사과정은 “기존 센서는 적용된 힘을 단 한 지점에서만 기록한다. 우리의 로봇피부는 이와 대조적으로 센서 표면에 작용하는 여러 힘을 구별하고 높은 해상도와 정확도로 계산할 수 있게 해 준다”고 말한다. 그는 “우리는 심지어 힘이 작용하는 방향도 결정할 수 있다”고 덧붙였다. 연구자들은 센서에 수직 압력을 가하는 힘뿐만 아니라 횡 방향으로 작용하는 전단력(shear forces)까지 확인해 낼 수 있었다. ◆데이터 기반의 촉각센서 개발 엔지니어들은 어떤 힘이 미세한 구슬을 밀어 어떤 방향으로 가게 했는지 계산하기 위해 포괄적인 실험 데이터를 사용했다. 이들은 기계 제어를 통해 표준화된 이 테스트에서 센서와 다양한 종류의 물체 간 접촉을 조사했다. 이들은 물체의 접촉하는 물체의 위치, 힘 분포 및 크기를 정밀하게 통제하고 체계적으로 변경할 수 있었다. 연구원들은 기계학습의 도움으로 수천 개의 접촉 사례를 기록하고 이를 구슬 패턴의 변화와 정확하게 일치시켰다.
연구진이 지금까지 만든 센서 원형 중 가장 얇은 것은 두께가 1.7cm로서 5x5cm의 표면적을 측정할 수 있었다. 그러나 연구원들은 센서가 감지할 수 있는 표면적을 더 늘리기 위해 여러 대의 카메라를 장착한 같은 기술을 사용해 복잡한 모양의 물체도 인식할 수 있게 됐다. 이들은 기존 기술을 이용해 더얇은 0.5cm 두께의 촉각 센서를 구현할 수 있다고 보고 이의 구현에 나서고 있다. ◆로봇·스포츠·가상현실 탄성 실리콘은 미끄러지지 않고 센서로 전단력을 측정할 수 있다. 따라서 이 촉각 센서는 로봇의 그립 암(grip arm·쥐는 팔)에 사용하기 적합하다. 스페라자는 “이 센서는 로봇팔의 손아귀에서 빠져 나가려 할 때 이를 인식해 잡는 힘을 조정할 수 있다”고 말했다. 연구원들은 또한 이 센서를 사용해 재료의 경도를 시험하거나 디지털 방식으로 접촉한 부분을 지도로 그려낼 수있다. 이 센서를 웨어러블 기기와 결합하면 자전거 타는 사람들은 자전거 페달에 얼마나 많은 힘을 가하는지, 조깅할 때 신발에 얼마나 힘이 가해지는 지 등을 측정할 수 있다. 게다가 이 센서는 가상현실(VR) 게임에서처럼 촉각 피드백 개발에 중요한 정보를 제공할 수 있다. | |||||||||||||||||||||||||||||
| <저작권자 © 로봇신문사 무단전재 및 재배포금지> | |||||||||||||||||||||||||||||


'로봇부품·소프트웨어' 카테고리의 다른 글
| 알에스오토메이션, 야스카와에 신제품 드라이브 ‘GA700’ 공급 (0) | 2020.03.25 |
|---|---|
| 본시스템즈, 보급형 정밀 감속기 '경박단소' 개발 (0) | 2020.03.24 |
| UC버클리, 필드 로봇용 내비게이션 시스템 개발 (0) | 2020.03.19 |
| 루시드 비전랩스, 3D ToF 모듈 발표 (0) | 2020.03.17 |
| 미쓰비시 일렉트릭, 자율주행차량용 'MEMS 소형 라이다' 개발 (0) | 2020.03.16 |