UC버클리 연구진이 역동적인 야외 환경에 적합한 모바일 로봇 내비게이션 시스템을 개발했다고 ‘더 로봇 리포트’가 보도했다. 연구진은 "실내에서 장애물을 피하면서 주행하는 모바일 로봇은 ‘기하학적 접근(geometric approach)’ 방식의 내비게이션 시스템을 갖추는 것으로 충분할 수 있지만 다양한 변수가 존재하는 필드 환경에선 이 같은 접근법이 충분하지 않을 수 있다"며 필드 환경에 적합한 모바일 로봇용 내비게이션 시스템인 ‘배저(BADGR·Berkeley Autonomous Driving Ground Robot)’를 개발했다고 밝혔다. 이번 연구는 미 육군연구소와 전미과학재단, 방위고등연구계획국(DARPA) 등의 지원을 받아 이뤄졌다. 일반적으로 역동적인 환경에 처한 필드 로봇은 울퉁불퉁하고 잡초가 우거진 거친 지형을 통과해야 한다. 전통적인 접근법은 컴퓨터 비전이나 시맨틱 라벨링(semantic labeling)에 기반한 모델을 기반으로 훈련해야 한다. 이번 연구에 참여한 UC 버클리 연구자인 ‘그레고리 칸(Gregory Kahn)’은 “대부분 모바일 로봇들은 기하학의 관점에서 장애물을 발견하고 경로를 수립한다”며 “ 이같은 기하학적인 관점은 많은 내비게이션 문제를 해결하는 데 충분치 않다”고 말했다. 이 문제를 해결하기 위해 ‘피터 애빌(Pieter Abbeel)’ 교수 등 연구진은 “처리되지 않은(raw) 시각적 인식을 사용하고, 인간이 제공하는 라벨 또는 기하학적인 맵의 도움없이도 로봇이 환경에 관한 특징들을 자율적으로 학습할 수 있도록 했다‘고 설명했다. 연구진은 로봇이 예측 모델을 개발하기위해 어떻게 ’경험‘을 활용할 수 있는지에 관해 탐구했다.
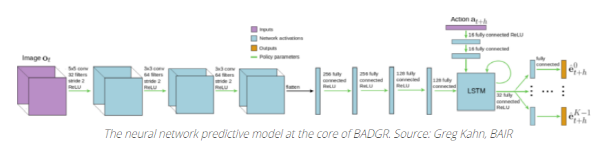
모바일 로봇용 내비게이션 시스템인 '배저'는 실제 환경에서 데이터를 수집하고 장애물을 회피할 수 있는 방법을 필수적으로 훈련한다. 이번 연구에는 클리어패스의 재칼(Jackal) 로봇을 활용했고, 이 로봇에는 관성측정장치 센서, GPS, 2D 라이더 센서, 엔비디아 젯슨 TX2 프로세서를 탑재했다. 연구팀은 최근 수집된(‘on-policy’) 데이터 보다는 제어 정책에 의해 수집된(‘off-policy’) 데이터를 활용해 학습 알고리즘을 개발했다. 또 로봇이 직선으로 움직이지 않는다는 가정하에 ‘랜덤 워크(random-walk)’ 정책을 적용했다. 이 같은 환경에서 배저는 자율적으로 라벨 데이터를 수집하고 이미지 기반의 예측 신경망 모델하에서 훈련을 했으며, 이 모델을 활용해 경험 기반의 경로를 수립하고 실행했다.
연구진은 배저를 야외 환경에서 실증 테스트를 진행했다. 42시간 동안 자율적으로 데이터를 수집한 후 성능을 테스트한 결과 적은 데이터로도 SLAM(Simultaneous Localization and Mapping) 방식보다 우월한 내비게이션 성능을 발휘했다는게 연구진의 설명이다. 울퉁불퉁한 지면이나 오프로드 환경에서 SLAM보다 높은 성공률을 보였다는 것. 또 반복적으로 테스트를 진행할수록 배저가 목표 지점에 도달하는 시간을 줄일 수 있다는 점도 확인했다. | ||||||||||||
| <저작권자 © 로봇신문사 무단전재 및 재배포금지> | ||||||||||||

'로봇부품·소프트웨어' 카테고리의 다른 글
| 본시스템즈, 보급형 정밀 감속기 '경박단소' 개발 (0) | 2020.03.24 |
|---|---|
| 로봇도 인간 손처럼 느낀다···스위스연방공대, 촉각센서 개발 (0) | 2020.03.20 |
| 루시드 비전랩스, 3D ToF 모듈 발표 (0) | 2020.03.17 |
| 미쓰비시 일렉트릭, 자율주행차량용 'MEMS 소형 라이다' 개발 (0) | 2020.03.16 |
| 로보틱 이큅먼트, 새 모바일 로봇 위해 'MiR용 부속기기' 출시 (0) | 2020.03.12 |