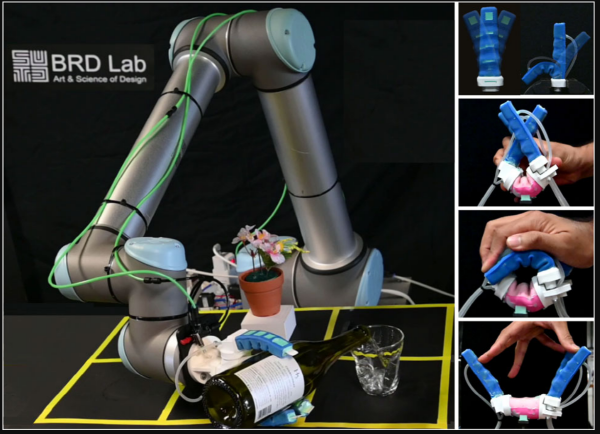
▲ 소프트 그리퍼를 이용해 잔에 와인을 따르고 있다.
싱가포르기술디자인대(SUTD·Singapore University of Technology and Design) 연구팀이 식품산업 등에서 활용할 수 있는 유연한 하이브리드 소프트 그리퍼 기술을 개발했다고 밝혔다. 이 서프트 그리퍼는 다양한 크기와 형태의 물체에 높은 적응력을 갖는다.
연구팀에 따르면, 로봇 자동화는 노동력 부족을 해결하는 데 획기적인 기술이다. 전통적인 강성 그리퍼는 일상적인 루틴 작업을 효과적으로 자동화하고, 정해진 규격의 물체를 다루는 데 효과적이다. 하지만 다양한 크기와 형태의 섬세한 물체를 처리해야 하는 식품산업 등에 활용하는 것은 위험이 따른다. 이러한 경우 보다 전문화된 유형의 그리퍼가 필요하다.
파블로 발디비아 이 알바라도(Pablo Valdivia y Alvarado) 싱가포르기술디자인대(SUTD) 교수는 "인간의 손재주와 통제력, 그리고 자연에서 영감을 받은 이 소프트 그리퍼는 특히 식품 산업에 적합하다. 이 그리퍼는 힘을 더 균등하게 배분하면서 다양한 크기와 형태의 물체에 적응할 수 있기때문에 섬세한 물건을 다루는 데 이상적”이라고 소개했다.
연구팀은 소프트 그리퍼 기술력을 앞세워 2022년과 2023년 ‘IEEE 로보소프트 매니퓰레이션 대회‘ 최우수상을 수상했다.
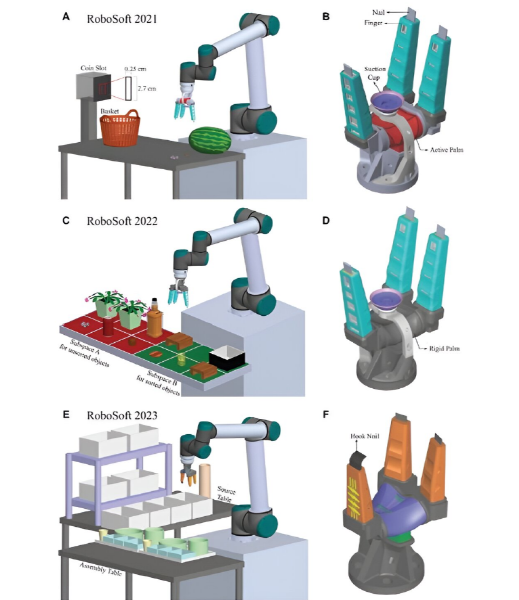
▲ 로보소프트 대회에선 선보인 소프트 그리퍼 기술
연구팀은 ‘IEEE 로보소프트 매니퓰레이션 대회‘의 경험과 그동안의 연구 성과를 바탕으로 학술 전문지인 ’프론티어스 인 로보틱스 앤 AI’에 소프트 그리퍼에 관한 논문을 발표했다.(논문 제목:Applications of a vacuum-actuated multi-material hybrid soft gripper: lessons learnt from RoboSoft manipulation challenge)
연구팀은 물체의 다양한 형태와 파지(把持) 모드에 적응할 수 있는 세 손가락 그리퍼를 설계했다. 내구성이 좋고, 마모에 강하며, 음식과 피부에 안전하며, 탄력성이 좋은 여러 재료들을 채택함으로써 그리퍼가 여러 물체에 쉽게 순응할 수 있도록 했다. 그리고 물체에 가해지는 압력의 과부하에 따른 근본적인 위험을 피하기 위해 진공 작동 방식을 채택했다.
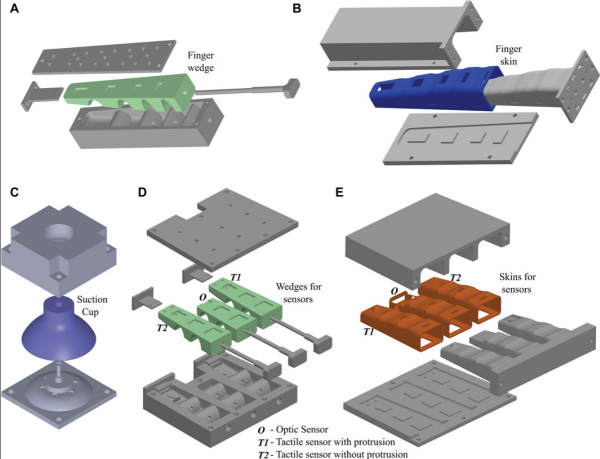
▲ 소프트 그리퍼의 구성 요소
진공으로 작동하는 하이브리드 소프트 그리퍼는 부드러운 손가락과 손바닥으로 구성돼 있다. 인체 해부학에서 영감을 받은 로봇 손가락들은 부드럽고 얇은 피부로 덮인 뻣뻣한 쐐기들(stiff wedges)을 포함하고 있다. 진공에 의해 로봇 그리퍼가 활성화되면, 피부 부분이 내려가면서 손가락들이 물체를 구부리고 잡을 수 있도록 해준다. 비슷하게 설계된 손바닥은 그리퍼의 물체 파지 용량과 조절 능력을 높인다.
연구팀은 이 그리퍼가 다른 소프트 그리퍼에 비해 넓은 파지 능력을 갖고 있다고 주장했다. 여기에 페이로드를 늘리기 위해 흡입 컵과 고리 역할을 하는 곡선 모양의 못(nail)을 추가함으로써 디자인을 개선했다는 설명이다.
발디비아 이 알바라도 교수는 “처리 시간을 단축할 수 있는 복잡한 엔지니어링보다는 간단하고 효율적인 솔루션을 선택하는 것이 중요하다. 또한 정기적으로 업데이트할 수 있도록 다재다능한 모듈식 설계가 중요하다”고 말했다. 무엇보다도 그리퍼의 적응력이 필수적이란 설명이다.
연구팀은 이 하이브리드 소프트 그리퍼가 식품 처리, 혼합된 상품의 포장 작업, 폐기물 분리, 도시 농업 등 분야에서 잠재력을 갖고 있다고 주장했다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'로봇부품·소프트웨어' 카테고리의 다른 글
| 美 올리스, 원격진단 SW로 산업 로봇셀용 PLC 지원 (3) | 2024.09.02 |
|---|---|
| 노스웨스턴대, 다재다능한 로봇 핸드 개발 목표로 '핸드 ERC' 설립 (3) | 2024.09.02 |
| 佛 코발, 로봇용 2세대 카본 진공 그리퍼 출시 (0) | 2024.08.29 |
| MIT-임프로버블 AI랩, 사람 손 처럼 능숙한 두 손가락 로봇 그리퍼 개발 (0) | 2024.08.29 |
| 제타위성뱅크, '엔비디아 젯슨 개발자 밋업'에서 위성자율주행 배달로봇 사례 발표 (1) | 2024.08.28 |