MIT와 임프로버블 AI랩(Improbable AI Lab) 공동 연구팀이 일상적인 조작 작업을 효과적으로 수행할 수 있는 두 손가락 로봇 그리퍼를 개발했다고 27일 밝혔다. 이 그리퍼는 평면에 놓여있는 접시나 종이처럼 얇은 물체를 집어 다른 곳으로 옮겨 놓을 수 있다.
연구팀은 이번 연구 성과를 출판전 논문 공유 사이트인 ‘아카이브(arXiV)’에 발표했다.(논문 제목:Everyday Finger: A Robotic Finger that Meets the Needs of Everyday Interactive Manipulation)
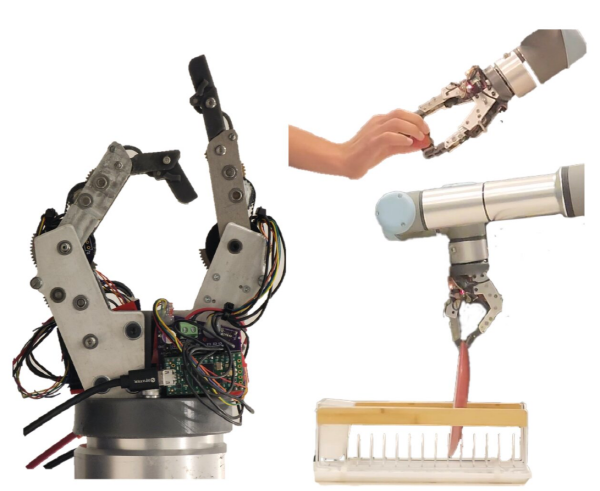
이 로봇 그리퍼는 다양한 모양과 질감을 가진 물체를 성공적으로 집어 지정된 위치에 배치할 수 있다. 복잡한 수작업보다는 물건을 정확하게 집어 원하는 위치에 놓는 간단한 일상 작업을 다루기 위해 로봇 손가락을 설계했다. 연구팀은 이 기술이 30가지 다양한 종류의 일상 작업을 수행할 수 있다고 밝혔다.
이 그리퍼는 ‘직렬-탄성 액추에이터(Series-Elastic Actuator)’ 기술을 기반으로 설계됐으며, 원하는 성능을 달성하면서 손가락을 최대한 소형화하는 데 초점을 맞췄다. 이 두 손가락은 구부리고 물체를 꽉 잡을 수 있는 등 크기와 모양 모두에서 인간의 손가락을 닮았다는 게 연구팀의 설명이다.
연구팀은 처음에 2개의 손가락만을 이용해 2 자유도(DoF)의 그리퍼를 만들었지만, 향후 더 많은 손가락을 갖고 있는 그리퍼를 만든다는 계획이다. 연구팀 관계자는 "우리의 손가락은 2자유도를 갖고 있지만 3번째 자유도를 갖게되면 손바닥의 크기는 커질 것이다. 앞으로 다섯 손가락을 손 안에 집어넣는 것은 어렵겠지만, 세 손가락에 이어 네 손가락은 아마 가능할 것이다. 하지만 다섯 손가락을 가진 완전한 손을 만들기 위해선 더 많은 토크 밀도의 액추에이터를 기다려야할 것“이라고 말했다.
연구팀은 두 손가락 그리퍼의 성능을 평가하기 위해 실험을 진행했다. 세 가지 기본적인 ‘픽 앤 플레이스’ 작업을 수행하면서 시스템의 속도와 물체에 가해지는 힘 등을 평가했다. 평가 결과 세 가지 기본적인 작업들을 성공적으로 수행했다. 연구팀은 향후 기본적인 가정용 로봇 개발시 이 그리퍼 기술을 활용할수 있을 것으로 기대하고 있다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'로봇부품·소프트웨어' 카테고리의 다른 글
| 싱가포르기술디자인대, 물체 적응력 갖춘 하이브리드 소프트 그리퍼 개발 (1) | 2024.08.29 |
|---|---|
| 佛 코발, 로봇용 2세대 카본 진공 그리퍼 출시 (0) | 2024.08.29 |
| 제타위성뱅크, '엔비디아 젯슨 개발자 밋업'에서 위성자율주행 배달로봇 사례 발표 (1) | 2024.08.28 |
| 中 선전서 텐센트 등 다양한 로봇핸드 시연 (0) | 2024.08.27 |
| 빅웨이브로보틱스, 기아 SUV 전기차 콘솔 제조기업 코모스에 자동화 공정 구축 (0) | 2024.08.27 |