
美 노스캐롤라이나주립대(NC주립대) 연구팀이 종이접기(오리가미) 원리를 활용해 여러 모양으로 형태를 바꿀 수 있는 변형 로봇(트랜스포머 로봇)을 개발했다고 29일 밝혔다.
단지 3개의 활성 모터를 사용해 단일의 플라스틱 정육면체 구조를 1000개 이상의 형태로 변형시킬 수 있는 방법을 발견했다. 이번 연구는 우주에서 사용되는 다용도 로봇 구조물처럼, 물체를 운반하면서 다양한 기능을 수행할 수 있는 로봇 기술 개발에 응용될 수 있을 것으로 기대된다.
이번 연구 성과는 학술 전문자 ‘네이처 커뮤니케이션즈’에 발표됐다.(논문 제목:Adaptive hierarchical origami-based metastructures)
논문 교신저자인 지에인(Jie Yin) 교수는 “우리는 어떻게 하면 최소한의 액추에이터로 다양한 변형을 만들 수 있는가라는 의문을 가졌다”면서, “층층이 쌓인 근육 섬유처럼 자연에서 관찰되는 계층적 개념을 사용해, 플라스틱 정육면체로 변형 로봇을 만들수 있었다”고 말했다.
연구팀은 속이 빈 플라스틱 정육면체를 3D 프린터를 이용해 조립했고, 이 가운데 36개를 회전하는 힌지를 활용해 조립했다. 일부 힌지는 금속 핀으로 고정됐고, 또 다른 힌지는 모터로 무선 작동됐다.
연구팀은 3개의 활성 모터를 사용하여 정육면체를 1000개 이상의 형태로 바꿀 수 있었다. 이들 형태에는 터널 모양 구조물, 다리 모양 구조물, 다층 건축물 등이 포함된다.
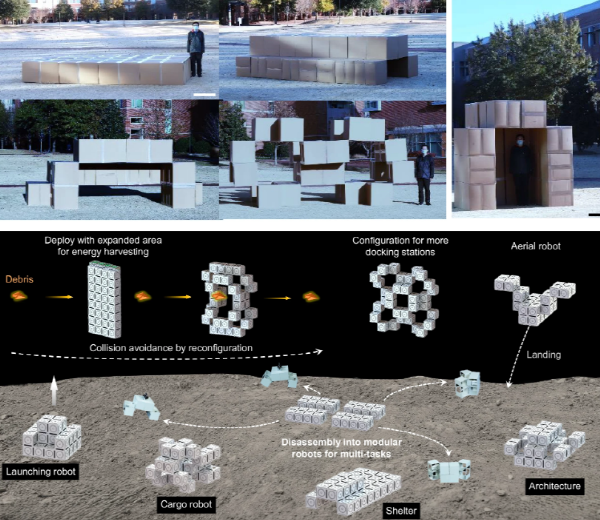
연구팀은 단지 구조물의 형태가 변하는 방식을 통제함으로써 발 없이도 트랜스포머 로봇이 앞, 뒤, 옆으로 움직일 수 있도록 했다.
로봇들은 완전히 열린 상태(평평한 모양)에서 완전히 닫힌 상태(대형 상자 형태)로 빠르게 바뀔 수 있다. 또한 자기 무게의 약 3배에 달하는 물건을 운반할 수 있다.
연구팀은 앞으로 트랜스포머 로봇이 더 큰 하중을 견딜 수 있도록 강력한 구조물을 만들겠다고 밝혔다. 연구팀은 이 로봇이 모듈러 방식으로 설계되었기 때문에 우주 공간에서 대피소나 서식지를 건설하고 해체하는 데 유용하게 활용될 수 있을 것으로 기대했다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 글로벌 에너지 기업 AES, 태양광 설치 로봇 도입 (0) | 2024.08.05 |
|---|---|
| 중국 연구팀, 모기 번데기 성별 분류 장치 개발 (0) | 2024.08.05 |
| 中 자동차 설계 기업 IAT오토모빌, 로봇 개발 나섰다 (0) | 2024.08.05 |
| 中 아스트리봇, 프리A 투자 유치...연내 로봇 상용화 (0) | 2024.08.05 |
| 日 후지, 폐기물 선별 로봇 '알-플러스' 개발 (0) | 2024.08.02 |