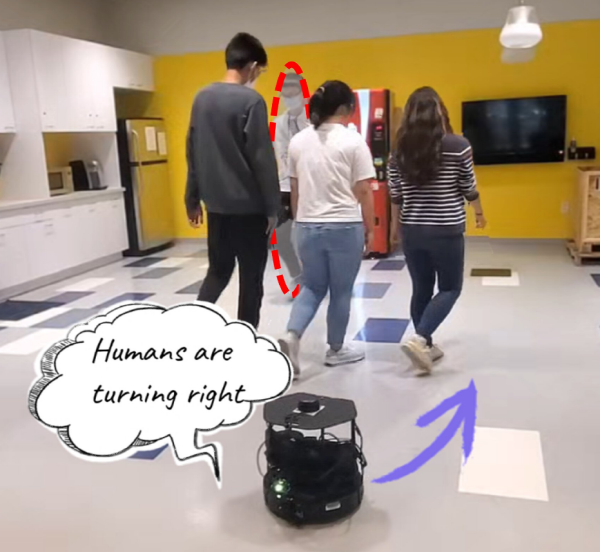
▲ 터틀봇을 이용해 심층 강화학습 기반 모델을 테스트하고 있다.(사진=일리노이드대 어버나 샴페인)
미국 일리노이대 어바나-샴페인과 스탠포드대 연구팀이 붐비는 공간을 탐색하고 이동하는 모바일 로봇의 능력을 제고할 수 있는 새로운 심층 강화학습 기반 기술을 개발했다고 테크엑스플로어가 지난 2일(현지 시각) 보도했다.
연구팀은 로봇 주변에 있는 '사람들'을 잠재적인 장애물 지표로 사용하는 아이디어를 기반으로 이 기술을 개발했으며, 연구 성과를 ‘아카이브’(arXiv)에 발표했다. 연구팀은 로봇 주변에 있는 사람을 일종의 센서로 활용할 수 있다고 생각했다. 이를 ‘센서로서의 사람(people as sensors)’이라는 용어로 표현했다.
이번 연구에 참여한 마샤 잇키나 연구원은 “이번 연구는 (로봇이) 막혀 있는 상황에서 매핑을 위해 '센서로서의 사람'을 활용한다"며 "핵심 통찰력은 우리가 상호작용하는 인간의 행동을 관찰함으로써 환경에 대한 공간적 추론을 할 수 있고, 사람들을 센서로 취급할 수 있다는 것이다”라고 말했다. 예를 들어 운전자가 갑자기 브레이크를 밟는 것을 관찰하면 해당 운전자 앞에 있는 도로에 보행자가 뛰쳐나왔을 수 있다는 추론을 할 수 있다는 것이다.
연구팀은 자율주행차 주변에 있는 운전자들을 위한 ‘센서’ 모델을 개발했다. 각 센서 모델은 운전자의 궤적을 운전자 전방의 주변환경에 관한 점유 그리드(occupancy grid)에 매핑했다. 이어 점유 추정값을 센서 융합 기술을 사용하는 자율 로봇의 맵에 통합했다.
사람을 센서로 인식하는 기존의 모델들은 자율 주행 차량의 안전성을 높이기 위해 도시 환경에서 구현되도록 특별히 설계되었다. 반면에 이번에 고안된 새로운 모델은 많은 사람들을 군중 사이를 이동하는 모바일 로봇의 능력을 향상시키기 위해 설계되었다.
일반적으로 군중속의 인간의 행동은 덜 구조화되어 있어 예측하기 힘들다. 이 때문에 도시내 자율주행 운전보다 군중 속을 이동하는 자율항법시스템이 난이도가 높다. 연구팀은 '가변 자동 인코더(VAE,variational autoencoder)로 학습된 폐색 인식 잠재 공간(occlusion-aware latent space)과 심층 강화 학습 모델을 통합해 이러한 과제를 해결했다.
연구팀은 테크엑스플로어에 "우리는 먼저 로봇 주변의 장애물에 대한 조감도나 톱다운 이미지처럼 로봇의 주변 환경을 로컬 점유 그리드 맵(local occupancy grid map)으로 표현한다"고 말했다. 이어 "점유 그리드 맵을 통해 우리는 개체와 사람의 수나 크기, 모양에 상관없이 그리드 영역 내에서 풍부한 상호 작용 행동을 포착할 수 있다"고 했다.
폐색 인식 잠재 표현은 궁극적으로 로봇이 임무를 수행하는 동안 충돌을 사전에 피하도록 장려하는 심층 강화학습 프레임워크에 공급된다. 연구팀은 모바일 로봇 '터틀봇(Turtlebot) 2i'를 사용해 시뮬레이션 환경과 실제 환경에서 자신들의 모델을 테스트했다.
연구팀은 "제한된 로봇 인식을 강화하고 폐색 인식 군중 탐색을 수행하기 위해 '센서로서의 사람' 개념을 성공적으로 구현했다"고 말했다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'로봇부품·소프트웨어' 카테고리의 다른 글
| 알에스오토메이션, 로봇 분야 생산라인 확대…”비대면 자동화 수요 증가” (0) | 2022.11.16 |
|---|---|
| KT, 서울로보틱스와 인프라 기반 자율주행(ATI) 사업 추진 (0) | 2022.11.14 |
| 美 하버드대, 해파리에서 영감얻은 소프트 로봇 그리퍼 개발 (0) | 2022.11.11 |
| 라이다 전문기업 벨로다인, 아우스터와 합병 (0) | 2022.11.10 |
| 에스피지, 독일 뉴렌베르크 SPS 전시회 참가 (0) | 2022.11.09 |