
▲ 상하이자오퉁대 연구진이 문어 촉수를 닮은 소프트 매니퓰레이터를 개발했다(사진=상하이자오퉁대)
중국 상하이자오퉁대(上海交通大学·상하이교통대) 연구진이 문어의 촉수처럼 유연한 소프트 매니퓰레이터를 개발했다고 테크익스플로어가 보도했다.
코끼리의 코, 문어의 촉수, 사람의 손은 부드러운 물체를 아주 유연하게 잡을 수 있다. 하지만 전통적인 로봇들은 부드러운 물체를 잡는 데 매우 큰 어려움을 갖고 있다.
상하이자오퉁대 기계공학부문 로봇연구소 '궈잉 구(Guoying Gu)' 교수 등 연구진은 문어의 촉수 등 동물에서 영감을 얻어 문어 촉수를 닮은 소프트 매니퓰레이터를 개발하고 연구 논문을 전문 저널 ‘어플라이드 피직스 리뷰스(Applied Physics Reviews)’에 게재했다.
이 매니퓰레이터는 공압적으로 작동하는 탄성중합체 구조인 ‘뉴-넷(pneu-nets)‘에 기반하고 있으며 다중 세그먼트(multiple-segment) 형태로 만들어졌다. 각각의 세그먼트는 비틀림, 나선형, 구부림 등 동작을 실행할 수 있다.
탄성중합체 구조는 내부에 서로 연결된 여러 개의 방(chambers)으로 이뤄져 있다. 이 방에 공기를 불어넣으면 풍선처럼 불어난다. 촉수의 한쪽은 딱딱하고 반대쪽은 부드럽기때문에 공기 압력을 높이면 단단한 쪽으로 구부러진다.
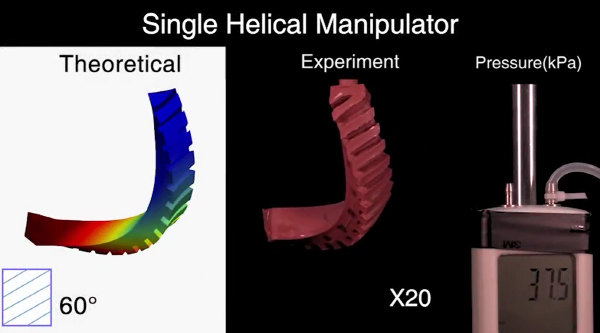

▲ 소프트 매니퓰레이터의 동작 원리를 설명한 그림(사진=동영상 갈무리)
논문 주요 저자인 동왕(Dong Wang)은 “특정 3D 공간 궤적을 따를 수 있는 수학적 모델을 활용해 소프트 매니퓰레이터를 설계했다"며 "소프트 매니퓰레이터는 각 세그먼트들이 서로 다른 방(챔버)의 방향을 선택함으로써 상이한 작동 모드(비틀림, 구부림, 나선형 휨)를 보여주는 여러 세그먼트로 구성되어 있다"고 말했다.
연구팀은 뉴넷 구조에 대한 기하학적, 재료 및 하중 매개변수를 변경해 다양한 3D 궤적을 위한 매니퓰레이터를 설계했다. 궈잉 구 교수는 ”소프트 매니퓰레이터가 진정으로 다양한 분야에서 응용되기위해선 더 많은 연구가 이뤄져야 한다“고 말했다.
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'로봇부품·소프트웨어' 카테고리의 다른 글
| 남호주대, 스마트 로봇 항법 알고리즘 개발 (0) | 2022.01.17 |
|---|---|
| 모벤시스, 인공지능 기반 예지보전 소프트웨어 기술 구현 (0) | 2022.01.13 |
| 美 로봇 운영관리 플랫폼 회사 ‘퍼먼트’, 215억원 투자 유치 (0) | 2022.01.13 |
| 美 보이언트 포토닉스, 칩 크기 라이다로 184억원 투자받아 (0) | 2022.01.11 |
| 중국 올레이, 물류 로봇용 50m 라이다 공급 (0) | 2022.01.11 |