미 컬럼비아대 연구진이 높은 수준의 정밀도를 갖고 있는 촉각센서 기반의 로봇 손가락을 개발했다고 발표했다. 일반적으로 촉각센서를 활용해 로봇 손가락(robot finger)을 제작하기 위해선 여러 장애물을 극복해야한다. 특히 여러 곡면을 갖고 있으면 로봇 손가락 터치시 터치한 곳을 인식하기 힘들고, 아주 조그만 손가락의 끝부분에 복잡한 배선을 넣는 것도 쉽지 않은 일이다. 이 같은 문제점을 극복하기 위해 연구팀은 로봇 손가락에서 기능적인 부분을 담당하는 투명 도파관층(transparent waveguide layer)을 만들고 경량 송수신기를 넣어 중첩 신호(overlapping signal)를 획득해 머신러닝으로 모델링했다.
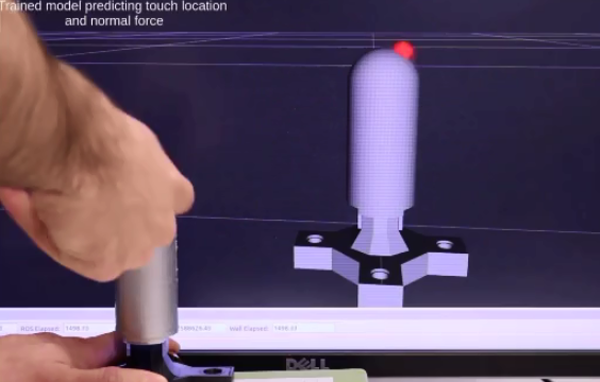
이번 연구를 주도한 ‘마테이 치오카를리(Matei Ciocarlie)’ 교수는 “촉각 센서와 촉각 기능을 갖고 있는 로봇 손가락간에서 간극이 존재한다”며 “촉각 센서는 아직 로봇 매니퓰레이션에서 널리 활용되고 있지 못하다”고 말했다. 연구팀은 이번 촉각 로봇 손가락에 관한 연구를 전문 저널(IEEE/ASME Transactions on Mechatronics)’ 온라인판에 게재했다. 송신기와 수신기간 빛의 이동을 측정하기 위해 연구팀은 터치시 나타나는 로봇 손가락의 반응 변화로부터 풍부한 신호 데이터 세트를 확보했다. 그리고 이 데이터 세트를 활용해 손가락의 촉각 위치와 힘의 세기에 관한 유용한 정보를 추출하고 딥러닝 기술로 훈련시켰다. 로봇 팔로 로봇 손가락을 건드리는 방식으로 촉감 위치와 힘의 세기를 측정했다. 연구팀은 간단한 배선으로 촉각 센서와 완전히 통합된 로봇 손가락을 제작했으며, 접근 가능한 제조 방법과 로봇 핸드 설계 방법도 도출했다.
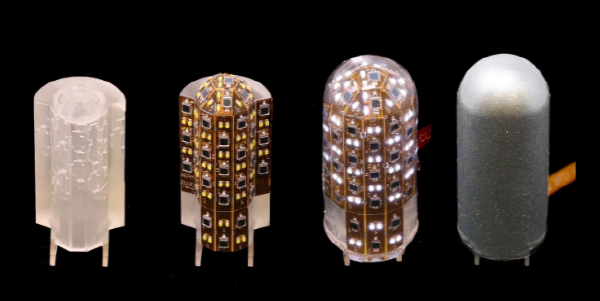
이번 프로젝트에서 연구팀은 30개의 LED와 32개의 포토 다이오드(photodiode)로 이뤄진 플렉시블 전자회로 장치를 투명 실리콘안에 넣어 로봇 손가락을 만들었다. 투명 실리콘은 로봇 손가락을 둘러싸고 있으며 손가락에서 피부 역할을 한다. 로봇 손가락에 무언가 닿으면 로봇 피부가 왜곡되면서 투명 실리콘 하단에서 빛의 이동이 시작된다. LED에서 다이오드로 얼마나 많은 빛이 이동하는 가를 측정하기 위해 연구팀은 접촉 정보를 포함해 거의 1000개에 가까운 신호를 획득했다. 빛이 곡면에서 반사되면 보다 복잡한 3D 형상을 처리할 수 있으며 곡면의 존재를 인식할 수 있다. 연구팀은 이들 신호 데이터를 머신러닝 알고리즘을 채택해 손가락의 어느 부분을 터치했는지, 그리고 어느 정도 힘이 가했는지를 인지할 수 있도록 했다. 연구팀의 한 관계자는 “우리의 연구 결과는 심층신경망 기술을 이용해 높은 정확도로 정보를 추출할수 있다는 것을 보여주었다”며 “우리의 장치는 AI알고리즘과 결합되어 사용될 수 있는 촉각 기능의 로봇 손가락”이라고 설명했다. 연구팀은 로봇 손가락이 거의 1000개에 달하는 신호를 수집할 수 있으며 14개의 케이블 배선으로 설계돼 전혀 복잡하지 않다고 덧붙였다. 연구팀은 이번 기술을 활용해 3개의 손가락과 4개의 손가락을 갖고 있는 2개의 로봇 핸드를 제작했다. 이달 중에 로봇 핸드의 촉각 능력을 보여줄 수 있는 시연 행사를 가질 예정이다. | |||||||||||||||||
| <저작권자 © 로봇신문사 무단전재 및 재배포금지> | |||||||||||||||||

'전문서비스로봇' 카테고리의 다른 글
| 마림바 연주로봇 '시몬', 싱어송라이터 되다 (0) | 2020.03.02 |
|---|---|
| 中 우한의 간호사 로봇 "체온, 혈압, 심박수도 재요" (0) | 2020.03.02 |
| 전세계와 연결되는 지능형 외골격 로봇 등장 (0) | 2020.03.02 |
| LG전자, 우아한형제들과 로봇 사업 업무 협약 (0) | 2020.03.02 |
| '5G+클라우드' 로봇, 中 칭다오 격리시설서 운영 (0) | 2020.02.28 |