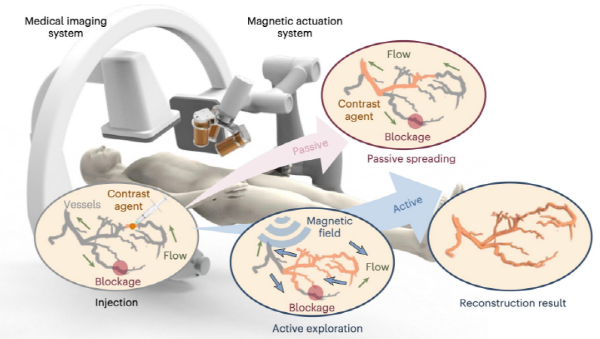
▲ 연구팀이 개발한 혈관 내부의 능동적 탐색 및 재구성 전략 개념(이미지=홍콩중문대)
홍콩중문대와 선전시 인공지능로봇연구원(AIRS·Shenzhen Institute of Artificial Intelligence and Robotics for Society)이 마그네틱 마이크로 로봇(군집)을 활용해 혈관 내부를 촬영할 수 있는 기술을 개발했다고 테크엑스플로어가 보도했다.
연구팀에 따르면, 혈관조영술은 X-선 등 영상 촬영 장비에 사람의 신체가 노출될 때 신체 내부의 특정 구조를 가시화하는 물질인 조영제를 사용해 혈관을 촬영할 수 있도록 해준다. 혈관조영술은 혈관을 통해 운반되는 조영제에 의존하며, 체내 자연스러운 혈액의 흐름을 활용한다.
혈관조영술은 의료 분야에서 널리 활용되고 있지만 상당한 한계도 갖고 있다. 예를 들어 혈류의 반대 방향에 있는 혈관 상류 영역 또는 혈전에 의해 차단된 영역을 시각화하는 데 어려움이 있다. 이러한 영역을 시각화하지 못하면 좁아진 혈관, 혈전, 혈관 간 비정상적인 연결 등 일부 혈관 상태의 치료를 진단 및 계획하는 데 차질이 빚어진다.
홍콩중문대와 선전시 인공지능로봇연구원은 이를 개선하기위해 자기 마이크로로봇 군집을 활용해 혈관 네트워크를 탐색하고 재구성하는 새로운 방법을 제안했다. 연구팀은 관련 연구 논문을 전문 학술지인 ‘네이처 머신 인텔리전스(Nature Machine Intelligence)’에 발표했다.(논문 제목:Active exploration and reconstruction of vascular networks using microrobot swarms)
새로 개발한 기술은 혈류 상류 지역과 차단된 지역 등 혈관 네트워크의 3D 이미징을 가능하게 해준다. 연구팀은 “혈관 조영술에 적용되는 수동 조영제(혈류를 따라 수동적으로 움직이는 물질)는 혈류의 방향에 크게 의존하기 때문에 상류 부위와 색전 부위를 영상 촬영하는 게 어렵다”면서 “자성 입자로 이뤄진 능동적인 에이전트를 도입하고, 외부 자기장을 통해 이를 제어할 수 있다“고 말했다. 이어 ”이 같은 전략은 자성입자 군집을 능동적인 에이전트로 구현하고, 필요에 따라 원하는 방향으로 안내할 수 있다“고 설명했다. 연구팀은 혈관 내부의 군집 마그네틱 로봇의 3D 위치를 캡처하기 위해 이미지 처리 장치를 따로 개발했다.
연구팀은 “이 같은 기술적 접근이 다양한 구조와 조건을 가진 혈관 네트워크에서 검증되었으며, 수동 조영제로 접근할 수 없는 영역을 철저히 탐색하고 재구성할 수 있게 해준다”고 주장했다. 이 기술이 혈관 시스템의 협착, 혈전 등을 찾는 데 유망하다는 것이다.
연구팀은 앞으로 마이크로 로봇 군집 기반 이미징 기술을 추가 실험을 통해 검증하고, 궁극적으로 의료 시설에 배치할 수 있도록 연구를 지속하겠다는 계획이다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 덴마크 메일리 로봇, AMR 관리용 ‘코드 라이선스’ 출시 (0) | 2025.04.21 |
|---|---|
| 중국 엔진AI, '앞 공중제비 휴머노이드 로봇' 출시 (0) | 2025.04.21 |
| 연기된 中 휴머노이드 로봇 마라톤 "오는 19일 개최" (0) | 2025.04.17 |
| 레인보우로보틱스-CJ대한통운, ‘AI 휴머노이드 물류로봇’ 공동 개발 추진 (0) | 2025.04.17 |
| 中 포워드엑스, 1만㎡ 규모 로봇 공장 공개 (1) | 2025.04.17 |