
▲ 박홍성 강원대 교수
현재 ISO TC299 WG6 로봇 – 서비스 로봇 모듈화 작업반에서는 2024년 1월에 로봇에 사용되는 모듈(로봇 모듈이라 칭함)에 대한 공통 정보 모델을 국제표준으로 발간하였고, 2024년 12월 말까지 소프트웨어 모듈용 정보모델을 표준의 최종 단계인 FDIS의 투표를 하고 있다. 이 표준은 국가기술표준원의 표준기술력향상사업 과제로 수행하였고, 필자 주도로 경희대 김동한 교수 협력으로 만들어졌다.
로봇 모듈은 기계식 모듈(예: 프레임, 커버, 바퀴, 링크, 조인트 등), 전기/전자적 모듈(전자 모듈이라 칭함. 예: 센서, 구동기, 제어기 등), 소프트웨어 모듈로 분류되는데, 공통정보모델은 모든 모듈에 공통적으로 활용하는 정보모델이고 소프트웨어 모듈용 정보모델은 공통정보모델을 기반으로 소프트웨어 모듈용으로 특화 개발된 정보모델이다.
정보모델은 모듈의 속성, 동작, 인터페이스, 안전 수준, 보안 수준, 시뮬레이션 모델(필요한 경우), 소프트웨어 작동 방식 및 필요 라이브러리 등을 정의하여, 모듈들의 상호운용성, 조합성과 재사용성을 보장할 수 있도록 하였다. 즉, 정보모델은 일종의 디지털 데이터 규격이라고 할 수 있다. 또한 로봇 모듈에 대한 식별자를 유일하게 부여함으로써 모듈에 대한 유지보수를 쉽도록 하였다. 이러한 내용들을 쉽게 유지하기 위하여 정보모델을 객체지향모델로 설계하였고, 그에 대한 구성도가 그림 1에 있다.
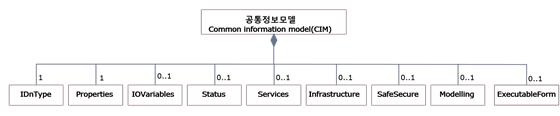
▲ 그림 1 공통정보모델
그림 1의 공통정보모델에서, 각 사각형은 클래스를 의미하며, 공통정보모델 클래스는 9개의 서브 클래스로 구성되어 있고 숫자 1은 필수를 의미하며 숫자 0..1은 선택할 수 있다는 의미이다. 이는 기계식 모듈, 전자 모듈과 소프트웨어 모듈에 따라 선택 혹은 필수가 될 수 있기 때문이다. 예를 들면 엑스큐테이블폼(ExcutableForm) 클래스는 소프트웨어 모듈인 경우 필수이지만, 기계식 모듈은 선택사항이거나 없을 수 있다.
로봇은 기계식 모듈, 전자 모듈 및 소프트웨어 모듈의 조합에 의해 다양한 로봇이 만들어질 수 있다. 지금까지 모듈 로봇이 많이 연구되고 상품으로 나왔지만, 해당 기업 혹은 연구로만 제한된 이유는 표준이 없었기 때문이다. ISO TC299에서 이러한 모듈 관련 표준이 제시되었기 때문에 이 모듈을 활용해 다양한 로봇 및 응용들을 개발할 수 있을 것이다. 이를 좀 더 확대하면 로봇 모듈의 내용이 대부분 공장 자동화 등에 사용할 수 있으므로 자동화 시스템까지 확대할 수 있을 것으로 생각되므로 유용성은 많을 것으로 보인다.
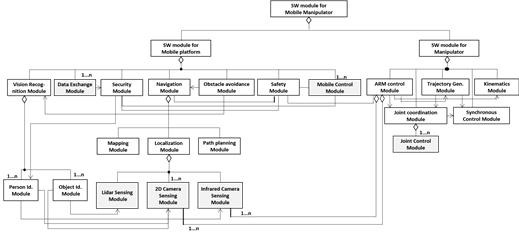
▲ 그림 2 이동 매니퓰레이터의 소프트웨어 모듈의 구성
그림 2는 이동 매니퓰레이터의 소프트웨어 구성을 소프트웨어 모듈 관점에서 보여준 것이다. 이러한 소프트웨어 모듈들은 이동 플랫폼과 매니퓰레이션용 소프트웨어 모듈들을 조합한 것이다. 이처럼 모듈화된 소프트웨어 모듈들의 조합을 통하여 로봇을 개발할 수 있다.
이러한 정보모델을 최근에 다양한 분야에서 많이 적용되고 있는 소프트웨어 정의형 기기에 적용하면 소프트웨어 정의 로봇을 쉽게 만들 수 있다. 로봇 자체부터 네비게이션 모듈, 모바일 제어 모듈까지 정보모델로 정의할 수 있으며, 이러한 정보 모델을 통하여 로봇은 어떤 모듈들을 로봇에 활용하고 있는지 정의할 수 있고 여기에 사용하는 시뮬레이션 모델로 정의할 수 있다. 로봇용 정보 모델에서 정의된 소프트웨어 모듈들은 다시 정보모델을 정의하게 되는데, 여기에는 실제 수행하는데 필요한 속성, 인터페이스, 서비스, 실행 파일과 실행 방법들을 정의하여 로봇이 해당 모듈을 쉽게 실행시킬 수 있다. 물론 이러한 소프트웨어 모듈들이 시뮬레이션 로봇 모델에 동작하도록 시뮬레이션 로봇 모델과 해당 소프트웨어 모듈이 연동되도록 디바이스 드라이버용 인터페이스가 제공되어 동작한다. 이러한 개념적인 내용이 그림 3에 제시되어 있다.
그림 3을 보면 “information model for SDR”의 내용이 로봇의 정보모델의 내용으로 로봇의 동작에 필요한 기능 SW 모듈들(그림 3의 Functional SW module 1, 2,..N)과 관련 속성(로봇의 기계식 속성-바퀴 크기 및 바퀴간 거리, 전기/전자적 속성-센서 및 구동기의 자세 등), 시뮬레이션 모델, 보안 및 안전 수준들이 제시되어 있고, 기능 SW 모듈들의 옆에 있는 정보모델(information model)에는 해당 모듈의 속성, 인터페이스, 보안 및 안전 수준, 소프트웨어의 동작 방법이 제시되어 있다. 이를 통하여 시뮬레이션 로봇 모델을 작동하거나 실제 로봇을 작동시킬 수 있다.

▲ 그림 3 소프트웨어 정의 로봇의 개념도
실제 이러한 방법을 사용하여 시뮬레이션 및 실제 로봇에 작동시킨 내용이 그림 4에 제시되어 있다. 이런 결과로부터 국제 표준인 정보모델이 소프트웨어 정의 로봇에 잘 적용될 수 있음을 알 수 있다.

▲ 그림 4 소프트웨어 정의 로봇의 동작과 실제 로봇의 동작
그림 4를 동작시키기 위해서는 시뮬레이션 로봇 혹은 실제 로봇에 맞도록 정보모델을 조합하여 검증한 후 각 시뮬레이션 로봇 모델과 실제 로봇에 다운로드하여 동작을 시키게 하는 도구가 존재하여야 한다.
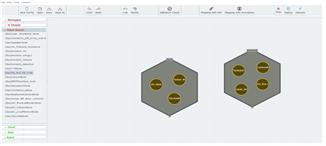
▲ 그림 5 정보모델 기반 로봇 동작 프로그램 저작 예
이러한 도구가 그림 5에 있다. 그림 5는 저작도구로 다이아몬드 2개는 각 로봇 모듈을 의미하고, 그안에 있는 원은 소프트웨어 모듈을 의미한다. 이러한 로봇 모듈과 소프트웨어 모듈은 왼쪽에 있는 창에 정의되어 있다. 이 창으로부터 드래그 앤 드롭 방식으로 만들면 된다. 소프트웨어 모듈간 상호 운용성 및 운영체제 동작 등은 정보모델의 내용을 통하여 검증할 수 있다.
또한 소프트웨어 모듈 및 로봇 모듈은 모두 식별자와 버전 번호를 가지고 있어서 유지보수를 쉽게 할 수 있도록 하였다. 특히 소프트웨어 모듈은 OTA를 통하여 유지보수가 가능하다.
이처럼 국제표준으로 제정된 정보모델을 활용하면 로봇에 사용되는 모듈을 쉽게 만들 수 있고 조합할 수 있다. 또한 소프트웨어 정의 로봇도 쉽게 구현할 수 있음을 보였다.
박홍성 hspark@kangwon.ac.kr
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문가코너' 카테고리의 다른 글
| 로봇 기업이 반드시 확보해야 하는 특허 포트폴리오 전략 3가지 (0) | 2025.02.27 |
|---|---|
| 미·중 휴머노이드 로봇 전쟁... 우리는? (1) | 2024.12.02 |
| AI 로봇은 유토피아 세상을 여는 미래도구 (3) | 2024.11.05 |
| 국방로봇 생태계 구축이 절실하다 (0) | 2024.10.29 |
| 기술특례상장 재신청 기업을 위한 주의사항 3가지 (0) | 2024.10.10 |