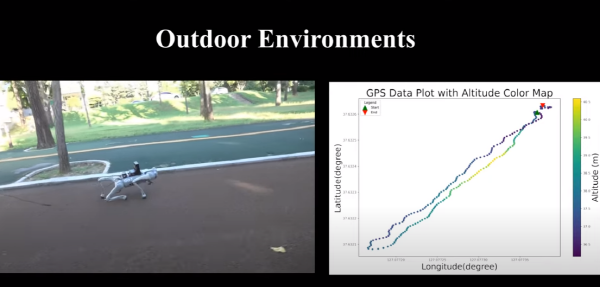
▲ 한쪽 다리가 손상된 4족 보행 로봇이 실외 환경에서 주행하고 있는 모습
서울과기대 연구팀(김민철, 신욱철, 김정엽)이 외부 사고나 내부 오동작으로 관절이 손상된 4족 보행 로봇의 보행을 지원하는 심층강화학습 프레임워크를 일본 요코하마에서 열린 ‘ICRA 2024’에서 발표했다.
ICRA 2024에 제출된 논문(제목:‘Learning Quadrupedal Locomotion With Impaired Joints Using Random Joint Masking‘)에 따르면, 4족 보행 로봇은 민첩한 운동 능력 덕분에 구조화된 환경부터 매우 복잡한 가혹한 지형에 이르기까지 다양한 환경에서 중요한 역할을 수행할 수 있다. 하지만 4족 보행로봇은 외부 사고나 내부 오작동으로 인해 관절 또는 모터가 손상되면 운동 기능을 제대로 발휘할 수 없다. 주행 도중 넘어져 일어나지 못하는 일이 벌어질 수 있다. 연구팀은 기존 알고리즘은 갑작스러운 관절 또는 모터의 기능 상실 문제에 대처할 수 없다고 지적했다.
연구팀은 이번 연구 논문에서 4족 보행 로봇의 일부 관절이 손상되었다고 하더라도 보행이 기능한 새로운 심층 강화 학습 프레임워크를 제안했다. 이번 연구는 카네기멜론대(CMU) 로봇공학연구소와의 협력으로 이뤄졌다.
연구팀이 제안한 심층강화학습 프레임워크는 3가지 구성 요소로 이뤄져 있다. ▲손상된 관절 시나리오를 시뮬레이션하기 위한 무작위 관절 마스킹(masking) 전략 ▲ 과거 관찰 이력을 바탕으로 현재 관절 상태를 예측할 수 있는 관절 상태 추정기(joint state estimator) ▲ 정상적인 보행과 손상된 관절의 다양한 보행을 모두 수행할 수 있도록 단일 네트워크를 허용하는 진보적인 커리큘럼 학습 등이다.
연구팀은 이번에 제안한 프레임워크를 유니트리의 4족 보행 로봇인 ’고(Go) 1’에 적용했다. 유니트리 4족 보행 로봇이 손상된 다리 관절을 갖고도 실내와 실외 환경에서 보행할 수 있는지를 실험을 통해 확인했다.
연구팀이 공개한 동영상에 따르면, 다리 관절이 손상된 4족 보행 로봇은 심층강화학습을 통해 정상적으로 보행하는게 가능하다. 연구팀은 우선 실내 환경에서 관절이 손상된 4족 보행 로봇의 다양한 보행 장면을 모션 캡처 장비를 통해 확인하고, 이어 야외에서 4족 보행 로봇을 테스트해 만족스러운 결과를 얻었다. 실험 결과 한쪽 다리를 쓰지 못하는 4족 보행 로봇은 비교적 평탄한 지형(코스1)과 잔디와 작은 돌 등이 있는 어려운 지형(코스2)을 안정적으로 보행하는 데 성공했다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'로봇부품·소프트웨어' 카테고리의 다른 글
| MIT CSAIL, 사람 손바닥 모사한 로봇 핸드 '젤팜' 개발 (0) | 2024.05.27 |
|---|---|
| 중국 AI 비전 전문기업 오르벡, 3D 비전 카메라 '제미니 330' 시리즈 출시 (0) | 2024.05.27 |
| 美 텔레오, 토마호크 건설 트럭에 ‘감독 자율성’ 탑재 (0) | 2024.05.20 |
| 伊 코마우, 물류·제조 픽킹용 비전시스템 ‘미라 원픽커’ 발표 (2) | 2024.05.20 |
| 스웨덴 웁살라대, 사람 손 모방한 인공촉각시스템 개발 (0) | 2024.05.20 |