구글이 UC버클리와 공동으로 인공지능을 이용해 사무실에서 장애물이나 사람을 피할 수 있는 로봇 내비게이션 시스템을 개발했다고 ‘벤처비트’가 보도했다. 이번 연구 성과는 출판전 논문 공개 서버인 ‘아카이브(Arxiv.org)’를 통해 공개됐다. 구글과 UC버클리 연구진은 ‘학습 기반의 인식(learning-based perception)’과 ‘모델 기반의 제어(model-based controls)’ 기술을 결합한 프레임워크를 제안하고, 터틀봇2를 이용해 로봇이 건물내에서 이동하는 사람을 잘 피할 수 있는지를 검증했다. 실험 결과 이번에 개발된 인공지능이 순수한 학습기반의 접근 방법보다 건물내에서 사람을 잘 피할 수 있는 것으로 나타났다.
연구진 설명에 따르면 자율 로봇 내비게이션 기술은 음식 배달 로봇, 재난구조 로봇, 물류 로봇 등 다양한 로봇 분야에 적용된다. 이들 로봇의 제1 과제는 처음 간 건물 안에서도 사람 또는 장애물을 피해가면서 이동하는 것이다. 예를 들어 이동 중 사람과 마주치면 사람이 움직이는 방향의 반대 방향으로 이동하거나 동일한 방향으로 이동하더라도 일정 거리를 떨어져서 움직여야 한다. 구글과 UC버클리 연구팀은 이번에 제안한 프레임워크에서 6000여장의 스캔 데이터로 이뤄진 ‘액티베이트 내비게이션 데이터셋(HumANav)’을 활용했다. 이 데이터셋은 사무실에서 활동하는 사람들의 리얼한 사진을 합성했다. 빌딩 메쉬(building mesh) 스캔은 오픈소스인 ‘스탠포드 라지 스케일 3D 실내 공간 데이터셋(Stanford Large Scale 3D Indoor Spaces Dataset)’에서 샘플을 얻었다. 또 다양한 사람 체형과 동작에 관한 이미지 데이터셋인 ‘서리얼 데이터셋(SURREAL Dataset)'도 적용했다. 프레임워크를 통해 사람의 좌표와 동작의 궤적을 렌더링하고 머신러닝 모델을 훈련시켰다.
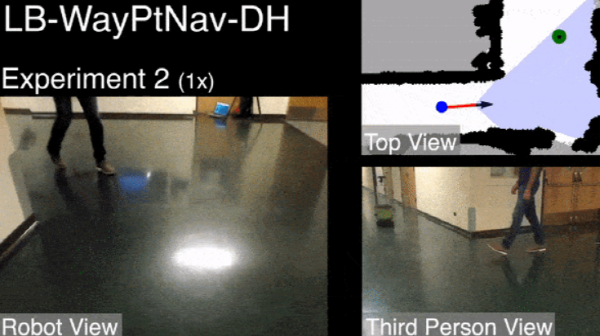
연구팀은 이번 실험에서 총 18만장에 달하는 샘플을 생성하고 이 가운데 12만5천장을 시뮬레이션 환경에서 모델(LB-WayPtNav-DH) 훈련에 활용했다. 터틀봇2 로봇을 이용해 실험을 진행한 결과 로봇은 사람이 오른쪽으로 걸어오면 왼쪽으로 피해갔고, 건물의 모퉁이 부분에선 사람과 충돌하지 않기 위해 큰 원을 그리면서 이동하는 동선을 취했다. 연구팀은 앞으로 사람이 훨씬 많고 복잡한 환경에서 로봇이 내비게이션 행동을 학습하는 방법에 관해 연구한다는 계획이다. | ||||||||||||
| <저작권자 © 로봇신문사 무단전재 및 재배포금지> | ||||||||||||

'인공지능' 카테고리의 다른 글
| KAIST, 스스로 그림 그리는 인공지능 반도체 칩 개발 (0) | 2020.04.07 |
|---|---|
| 팬텀AI, 2200만달러 규모의 시리즈A 투자유치 (0) | 2020.04.06 |
| 머니브레인, 영어회화 ‘스픽나우 키즈’ 인공지능과 만나다 (0) | 2020.04.03 |
| 인천시-인하대, 인공지능융합연구센터 설립 추진한다 (0) | 2020.04.02 |
| 인공지능으로 CTㆍ엑스레이 영상 분석해 코로나19 진단한다 (0) | 2020.04.02 |