
▲줄자 모양의 그리퍼가 과일을 따고 있다(사진=UC 샌디에이고)
UC 샌디에이고 연구팀이 ‘줄자’처럼 접었다 펼 수 있는 로봇 그리퍼 ‘그립-테이프(GRIP-tape)’를 개발했다고 지난 9일 밝혔다.
연구팀은 줄자가 구부러기 전에 얼마나 멀리 늘어나는지를 겨루는 아이들의 게임에서 영감을 받아 줄자처럼 접었다 펼 수 있는 로봇 그리퍼를 개발했다. 이번 연구 성과는 전문 학술지인 ‘사이언스 어드밴시스’에 발표됐다.(논문 제목:Grasping and rolling in-plane manipulation using deployable tape spring appendages)
UC 샌디에이고 기계항공공학과 닉 그라비쉬(Nick Gravish) 교수는 "우리는 전통적이지 않고 직관적이지 않은 로봇 메커니즘을 찾는 것을 좋아한다. 줄자는 부드러움과 단단함이 함께 결합된 멋진 구조를 갖고 있다"고 말했다. 여러 차례의 시행착오 끝에 연구팀은 두 개의 테이프를 접착제로 묶는 것이 그리퍼에 가장 적합한 구성이라는 결론을 내렸다.
‘그립-테이프’의 '그립(GRIP)'은 ‘Grasping and Rolling In-Plane’의 약자다. 이 로봇 그리퍼는 부서지기 쉬운 과일이나 채소를 잡을수 있을 만큼 가벼워 농업 분야에 활용될 수 있을 것으로 기대된다. 제작 비용이 저렴하고, 사람 주변에서도 안전하다.
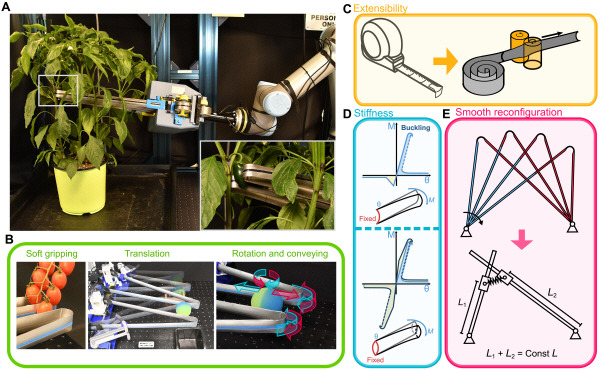
▲그리퍼의 작동 원리
이 로봇 그리퍼는 얇고 가벼우면서도 충분한 강도를 지녀, 딸기나 토마토 같은 연약한 농산물도 안전하게 잡을 수 있다. 기존 그리퍼는 확장 기능을 위해 복잡한 메커니즘과 부피를 필요로 했지만, 그립 테이프(GRIP-tape)는 두 개의 줄자처럼 생긴 스풀(감개)을 서로 묶어 만든 구조로, 두 손가락처럼 작동한다.
줄자는 평소에는 말려 있지만, 필요 시에는 뻗어 먼 곳의 물체도 쉽게 잡을 수 있다. 탄성과 복원력이 뛰어나 원하는 방향으로 구부릴 수 있고, 다시 원래 형태로 돌아오며, 접촉 시 물체를 손상시키지 않을 정도로 얇아 안전성도 확보했다. 테이프가 견고하면서도 유연하고, 접었을 때는 작은 용기에 보관할 수 있다.
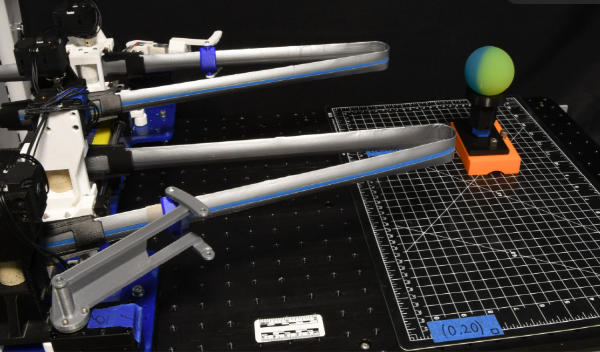
▲연구팀이 그리퍼를 이용해 다양한 물체를 조작하는 테스트를 수행하고 있다.
또한 그립 테이프는 물체를 회전시키거나 컨베이어 벨트 역할을 할수 있다. 고무공, 토마토, 토마토 넝쿨, 레몬 등 다양한 모양과 강도를 가진 다양한 물체를 잡을 수 있다. 테이프 자체가 컨베이어 벨트 역할을 할 수 있기 때문에 잡은 물체를 용기에 쉽게 넣을 수 있다.
실험 결과, 이 그리퍼는 신선한 레몬과 같은 큰 과일도 쉽게 들어올릴 수 있는 것으로 나타났다. 연구팀은 이 그리퍼가 자율적으로 작동할 수 있도록 고급 센서와 AI 기반 데이터 분석 기능을 추가해 기존 그리퍼의 성능을 개선할 계획이다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'로봇부품·소프트웨어' 카테고리의 다른 글
| 加 크라켄 로보틱스, 글로벌 '합성개구소나' 서비스 시작 (0) | 2025.04.14 |
|---|---|
| 클로봇, ‘2025 서울모빌리티쇼’서 ‘스팟’ 활용 방안 공개 (0) | 2025.04.14 |
| 中 로봇핸드 기업 ‘링커봇’, 200억원 규모 시드 투자 유치 (1) | 2025.04.14 |
| 대동기어-에이블맥스, 방산 시장 개척 위한 '업무협약' 체결 (0) | 2025.04.09 |
| 加 생추어리 AI, 강화학습 통해 유압 로봇손 제어 (0) | 2025.04.09 |