▲ MIT 링컨연구소와 노트르담대 공동 연구팀이 잔해 더미 속을 탐색하는 플렉시블 로봇을 개발했다. (사진=MIT)
대형 재난이 발생해 구조물이 무너지면 사람들은 잔해더미 속에 갇힌다. 위험한 재난 환경에서 구조대원들은 먼저 생존자 수색 활동부터 시작하지만, 매우 위험하고 육체적으로 힘들어 금세 지치고만다. 로봇과학자들이 잔해 더미 안으로 집어넣을 수 있는 모듈러 방식 ‘뱀형 로봇’ 개발에 앞다퉈 나서고 있지만, 실제 투입하는 데는 아직 한계가 있다. 미로처럼 얽혀있는 잔해 더미 속을 비집고 들어가는 게 기술적으로 쉽지 않기 때문이다.
MIT 링컨연구소는 노트르담대 연구팀과 협력해 넝쿨처럼 뻗어나갈 수 있는 플렉시블 로봇 ‘스프라우트(SPROUT·Soft Pathfinding Robotic Observation Unit)’를 개발했다고 MIT 뉴스가 2일(현지 시각) 보도했다. 기존 뱀형 로봇이 아니라 좁은 통로 사이를 비집고 들어갈 수 있는 새로운 형태의 로봇을 제시한 것이다.
소프트 로봇의 일종인 스프라우트는 장애물 주변과 좁은 공간을 넝쿨처럼 자라면서 안으로 파고들 수 있다. 구조대원들은 무너진 구조물 아래 스프라우트를 설치해 잔해 더미 속을 탐색하고, 지도를 만들어 최적의 진입 경로를 찾을 수 있다.
스프라우트 연구팀인 '채드 카운슬'은 “도심 내 수색 및 구조 환경은 매우 거칠고, 험난해서 아무리 뛰어난 기술을 적용하더라도 작동하는 데 어려움이 따른다. 넝쿨 로봇의 근본적인 작동 방식은 다른 플랫폼이 직면하는 많은 문제를 완화할 수 있다”고 말했다.
연구팀에 따르면, 수색 및 구조 작업을 위해 특별 제작된 카메라는 붕괴된 구조물 내부의 직선 경로를 주로 탐색할 수 있다. 수색팀이 더 깊은 곳까지 수색하려면, 구멍을 뚫은후에 다음 공간으로 이동해야한다. 로봇은 잔해 더미 위를 탐색하는 데는 적합하지만 좁고 불안정한 구조물 내부를 수색하는 데는 적합하지 않으며, 손상될 경우 많은 수리 비용이 들어간다.

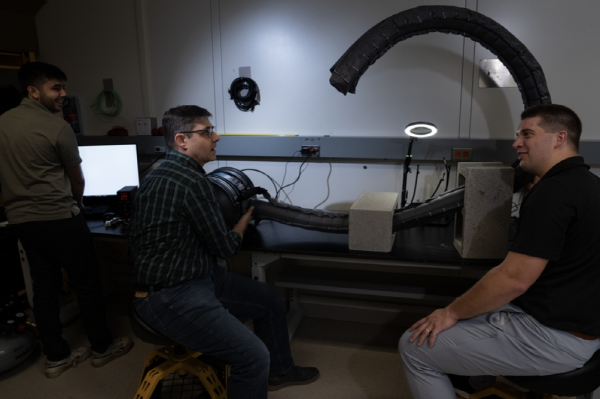
▲ 연구팀이 넝쿨 로봇을 잔해 더미 속으로 밀어넣고 있다(사진=MIT)
연구팀이 개발한 스프라우트는 잔해 더미 속으로 들어가면서 풍선처럼 부풀어오르는 패브릭 튜브로봇이다. 공기가 차오르면 넝쿨 처럼 앞으로 뻗어나간다. 튜브는 구석진 곳을 만나면 구부러지면서 좁은 통로를 통과할 수 있다. 튜브 끝에 장착된 카메라와 센서는 로봇이 이동하는 환경을 이미지화하고 매핑한다. 작업자는 카메라가 전송하는 내부 화면을 보면서 조이스틱으로 로봇을 조종할 수 있다. 현재 스프라우트는 최대 10피트(3.048M)까지 이동할 수 있는데, 연구팀은 25피트(7.62M)까지 확장하기위해 노력하고 있다.
이 로봇은 여러 지점에서 구부러지는 변형 가능한 소재로 만들어졌기 때문에 잔해 더미의 빈공간을 찾아 펼쳐진다. 연구팀은 펼쳐지는 로봇의 형태를 결정하고 제어하는 게 큰 도전과제였다고 말했다. 넝쿨 로봇이 자라는 동안 마찰을 최소화할 수 있도록 튜브를 설계하고 조향을 위한 제어 장치를 만들어야 했다.
연구팀을 이끌고 있는 ‘나타니엘 핸슨(Nathaniel Hanson)’은 “붕괴 사고는 드물지만 치명적인 사건이다. 로봇공학에선 일반적으로 접근 방식을 검증하기 위해 실측 측정값이 필요하지만, 붕괴된 구조물에선 이러한 측정값이 존재하지 않는다”고 털어놨다. 이 문제를 해결하기 위해 연구팀은 무너진 구조물을 사실적으로 묘사하고 빈 공간을 매핑하는 알고리즘을 개발할 수 있는 시뮬레이터를 제작했다.
나타니엘 핸슨은 “로봇의 기계적 성능은 즉각적인 효과가 있지만, 진정한 목표는 구조팀의 상황 인식을 향상시키기 위해 센서를 사용하는 방식을 재고하는 것이다. 궁극적으로 우리는 스프라우트가 잔해 더미에서 팀원들에게 완전한 작동 상황을 제공할 수 있기를 기대하고 있다”고 말했다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 일본 GMO AIR, 휴머노이드 로봇 '인재 파견형 서비스' 개시 (1) | 2025.04.04 |
|---|---|
| 참치처럼 헤엄치는 로봇...차세대 수중 드론 개발 중 (0) | 2025.04.03 |
| 中 매직랩 휴머노이드 로봇, 음악 축제에서 ‘도우미’ 활약 (0) | 2025.04.03 |
| 美 애질리티 로보틱스, 디지트 활용 효율 극대화 혁신 발표 (1) | 2025.04.03 |
| UC 샌디에이고 연구팀, 전자장치 없이 작동하는 3D 프린팅 보행 로봇 개발 (1) | 2025.04.02 |