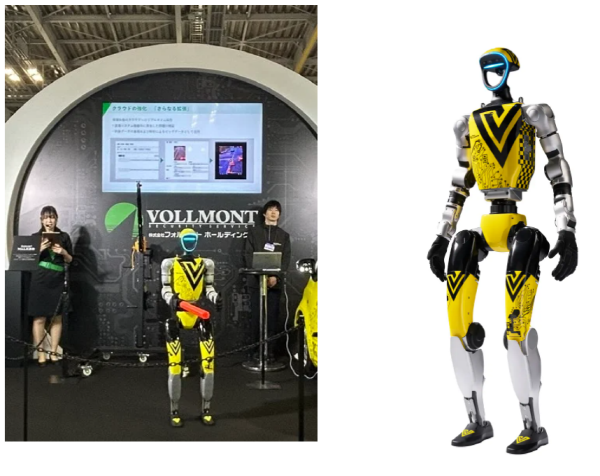
▲교통 유도를 위한 휴머노이드 로봇 ‘커뮨+워커'(사진=볼몬트)
일본 볼몬트 홀딩스(Vollmont Holdings)가 이달 4~7일 도쿄 빅사이트 전시장에서 열린 ‘시큐리티쇼 2025’에 차세대 교통경비 시스템과 연계한 휴머노이드 로봇을 선보였다고 26일 밝혔다. 이 로봇은 도로 공사 등 유사 시에 차량을 통제하기위한 목적으로 개발됐다.
볼몬트는 차량 일방통행 시스템의 새로운 버전인 ‘커뮨+모델-S 2.0’과 연동해 사람처럼 차량의 이동및 통제 업무를 수행할 수 있는 휴머노이드 로봇 ‘커뮨+워커(Comune+Walker)’를 현장에서 시연했다. ‘커뮨+모델-S’는 도로 공사 현장의 차량 유도를 자동화할 수 있는 교통유도시스템으로 지난 2022년 12월 처음으로 개발됐으며, 교통 시뮬레이터를 통한 기능 개선으로 2.0 개발을 완료했다.
이 휴머노이드 로봇은 차량 일방통행 유도 시스템 '커뮨+모델-S 2.0(Comune+ model-S 2.0)'에서 통보된 '진행-정지'명령을 수신하고 이에 따라 교통유도 동작을 수행할 수 있다. 이 로봇은 키 127cm, 무게 35kg으로 전신 43 자유도를 갖고 있다. 향후 현장 실증 실험을 목표로 개발을 진행하며, 현장의 다양한 상황에 대응할 수 있는 로봇으로 계속 진화해 나갈 예정이다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 트위니, ITS와 손잡고 북미 물류자동화 시장 공략 (0) | 2025.03.27 |
|---|---|
| 美 콘토로 로보틱스, 하역용 로봇팔로 176억원 유치 (0) | 2025.03.27 |
| 美 파이어플라이, 하니비 로보틱스와 달탐사 로버 협력 (0) | 2025.03.26 |
| 英 호누웍스, 해저 서비스 위해 ROV ‘밸러’ 첫 인수 (0) | 2025.03.26 |
| 中 스마트폰업체 '비보', 휴머노이드 로봇 사업 진출하나? (0) | 2025.03.25 |