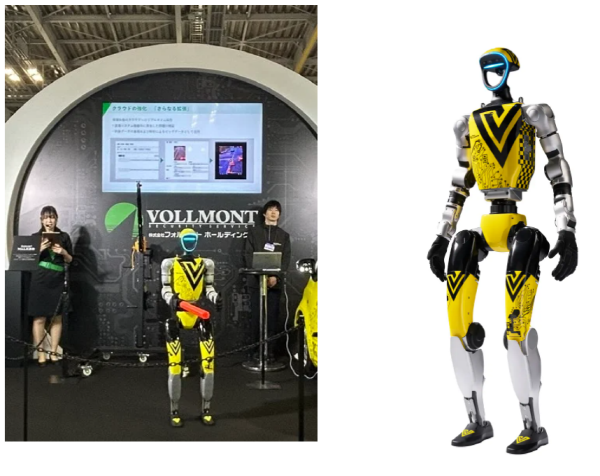
▲교통 유도를 위한 휴머노이드 로봇 ‘커뮨+워커'(사진=볼몬트) 일본 볼몬트 홀딩스(Vollmont Holdings)가 이달 4~7일 도쿄 빅사이트 전시장에서 열린 ‘시큐리티쇼 2025’에 차세대 교통경비 시스템과 연계한 휴머노이드 로봇을 선보였다고 26일 밝혔다. 이 로봇은 도로 공사 등 유사 시에 차량을 통제하기위한 목적으로 개발됐다. 볼몬트는 차량 일방통행 시스템의 새로운 버전인 ‘커뮨+모델-S 2.0’과 연동해 사람처럼 차량의 이동및 통제 업무를 수행할 수 있는 휴머노이드 로봇 ‘커뮨+워커(Comune+Walker)’를 현장에서 시연했다. ‘커뮨+모델-S’는 도로 공사 현장의 차량 유도를 자동화할 수 있는 교통유도시스템으로 지난 2022년 12월 처음으로 개발됐으며, 교통 시뮬레이터를 통한 기능 ..