
▲ 스마트 휠체어가 장애물을 인식하면서 이동하고 있다.(사진=미시건대)
美 미시간대 연구팀이 로봇운영체제(ROS) 기반 스마트 휠체어 ‘코내브(CoNav)’를 개발했다고 밝혔다.
이번 연구 성과는 출판전 논문 공개 사이트인 ‘아카이브(arXiv)’에 발표됐다.(논문 제목:Design of a ROS-based Smart Wheelchair for Shared Control Navigation in the Built Environment)
이 휠체어는 일시적 또는 영구적으로 걸을 수 없는 사람들이 보다 직관적으로, 그리고 자율적으로 움직일 수 있도록 도와준다.
논문 수석 저자인 비넷 카마트(Vineet Kamat)는 테크엑스플로어와의 인터뷰에서 "이번 연구는 장애인을 위한 '보조적 이동성(모빌리티)'에 대한 광범위한 도전에서 영감을 받았다"면서 ”이동성은 독립적인 삶, 사회 참여, 전반적인 삶의 질 향상에 매우 중요한 역할을 한다. 기존의 전동 휠체어(PWC)는 사용자의 이동성을 개선하는 데 크게 기여했지만 여전히 작동하는 데 어려움이 있으며, 복잡한 환경을 탐색하는 것이 힘들다“고 말했다.
그동안 개발된 대부분의 휠체어는 완전히 자율적이거나, 사용자가 수동으로만 조작할 수 있다. 이같은 유형의 휠체어들은 역동적인 환경에서 자율주행 성능이 떨어지는 경우가 많고, 이동 장애가 있는 사람이 수동으로 조작하는 데 어려움을 겪는다.
미시간대 연구팀이 개발한 '코내브'는 사용자가 휠체어의 작동을 수동으로 제어할 수 있으며, 그렇지 않을 경우, 시스템이 주변 환경을 자율적으로 탐색한다.
논문 수석저자인 캐롤 메나사(Carol Menassa)는 "우리의 주요 목표는 ‘자율성’과 ‘사용자 제어’를 균형있게 유지하면서 효율적인 내비게이션을 가능하게 하는 스마트 휠체어를 설계하는 것이다. ‘휴먼 인 더 루프(human-in-the-loop, 자동화·자율화된 기계나 시스템 일부에 인간의 판단이나 제어를 개입시키는 것)’ 프레임워크는 신뢰성, 사용성, 접근성을 높여 장애인들이 일상 생활에서 더 쉽고 자신 있게 주변을 탐색 및 이동할 수 있도록 돕는다"고 말했다.
코내브는 복잡하고 역동적인 환경에서 효과성이 떨어지는 기존의 완전 자율 휠체어와는 달리, ‘협업 내비게이션’ 방식을 채택했다. 즉, 휠체어의 지능형 의사결정 시스템에 ‘모델 예측 제어(MPC)’라는 방법을 채택했다.
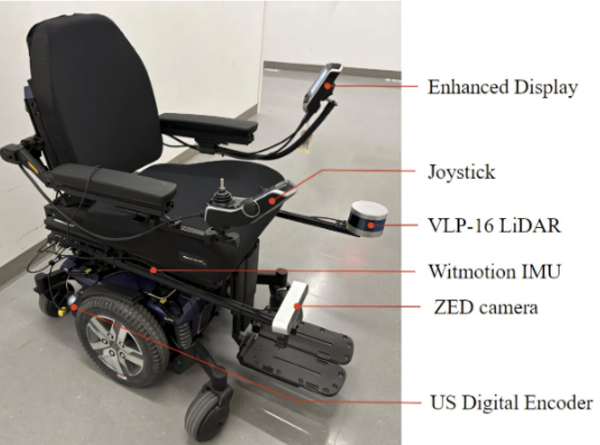
▲ 스마트 휠체어의 구조(사진=미시간대)
이 스마트 휠체어는 의자, 바퀴, 조이스틱, 다양한 센서 등으로 구성돼 있다. 사용자는 조이스틱을 움직여 휠체어가 움직이는 방향을 표시한다. 휠체어는 장애물, 벽, 경로를 감지하는 센서(LiDAR, 카메라, IMU)를 갖추고 있으며, 센서를 활용해 최적의 경로를 생성해준다. 이 휠체어는 적응형 제어(adaptive control)의 가능성을 제공하는데, 이는 조이스틱을 통해 사용자가 제공하는 방향을 항상 따르거나 완전히 무시하는 것이 아니라, 자체적인 내비게이션 계획과 통합한다는 의미다.

▲ 사용자가 휠체어 조작 방법을 배우고 있다(사진=미시간대)
사용자가 휠체어를 적극적으로 조종할 경우, 휠체어는 자신의 내비게이션 계획보다 사용자의 입력을 우선시하는 방법을 학습한다. 반대로 사용자가 조이스틱을 통해 길 안내를 제공하지 않으면, 시스템이 자율적으로 안전하고 원활한 내비게이션을 지원한다.
연구팀은 스마트 휠체어가 자율 제어와 수동 제어를 결합해 내비게이션을 더 부드럽고 직관적으로 만들어 준다고 말했다. "사용자 의도와 AI 기반 내비게이션을 결합해 보다 자연스럽고 효율적이며 사용자 친화적인 휠체어 경험을 만들어주기 때문에 일상적인 환경에서 장애인들의 이동성과 독립성을 높여준다”고 말했다.
또한 "전통적인 수동 휠체어는 좁은 공간에서 제어하는 게 어려워 주변 물체와의 충돌이 빈번하게 발생할 수 있는데 반해 완전 자율 휠체어는 동적 환경에서 장애물을 만나면 때때로 얼어붙기도 한다. 이에 비해 우리의 공유 제어 접근 방식은 사용자 입력과 실시간 장애물 회피를 결합하여 충돌을 줄이고 보다 성공적인 내비게이션을 제공한다“고 설명했다.
연구팀은 코내브를 사용하면 수동으로만 조작할 수 있는 휠체어보다 원하는 목적지에 더 빨리 도달할 수 있다는 사실도 발견했다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'개인서비스로봇' 카테고리의 다른 글
| 에코백스, ‘물걸레 실시간 세척’ 가능한 신형 로봇청소기 런칭 (0) | 2025.02.05 |
|---|---|
| 日 사이버다인, 아동용 재활 로봇 의료기기 승인 획득 (0) | 2025.02.05 |
| 中 '등산 보조' 로봇 등장..."태산 올라도 다리가 안 아파요" (1) | 2025.02.04 |
| 에브리봇, 침구 로봇청소기 ‘X1’ 초도 물량 완판 (0) | 2025.01.24 |
| 하이코어, 스마트 로봇 체어 '에브리고 HC' 출시 (0) | 2025.01.22 |