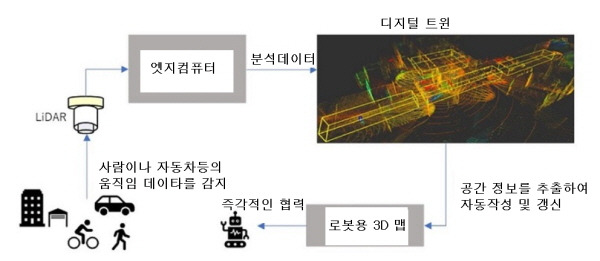
▲ 실증 실험의 환경과 시스템 구성
일본에서 실시간으로 구축된 디지털 트윈을 활용해 도로를 횡단하는 로봇을 자동 제어하는 실증 실험이 성공적으로 이뤄졌다.
일본 가시마건설(鹿島建設), ㈜하이퍼디지털트윈(HDT), 하네다미라이개발(주), 시바우라공대 등 4개 기업 및 기관은 하네다공항 인근의 대규모 복합시설 ‘하네다 이노베이션 시티(HIcity)’에서 디지털 트윈 기술을 활용해 도로를 횡단하는 로봇의 자동제어 실증 실험을 성공적으로 실시했다고 밝혔다.
이번 실증실험은 여러 대의 로봇을 제어하는 가시마의 로봇통합관제시스템과, 실시간으로 구축된 디지털 트윈으로부터 로봇의 자동제어에 필요한 공간정보를 추출하는 HDT 기술을 결합하는 방식으로 이뤄졌다.
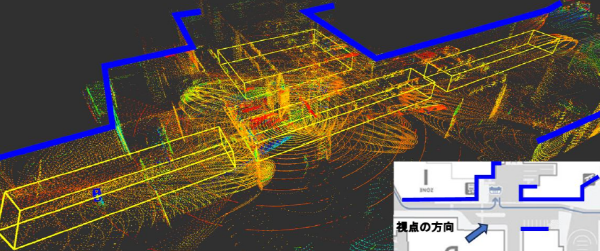
▲ 하네다 이노베이션 시티내 도로에 구축된 디지털 트윈
로봇에 탑재되어 있는 카메라나 센서는 차량과 사람이 멀리 떨어져 있거나 사각 지대에 있으면, 이를 제대로 인식할 수 없어 로봇과 동체(차량, 사람 등) 간 충돌이 우려된다. 특히 미래에 앞다퉈 구축되는 스마트시티에선 노동력의 감소 추세에 대처하기 위해 다수의 로봇을 경비·운반 등 업무에 활용해야 하는데, 다수의 자동차나 사람이 이동하는 도심에선 로봇과 동체 간 충돌을 회피해야 하는 도전적 과제를 해결해야만 한다.
이 같은 과제를 해결하기 위해서 4개 기업 및 기관은 지난 2023년 10월부터 2024년 2월까지 국토교통성의 '스마트시티 실장화 지원사업'의 일환으로 로봇의 도로 횡단시 자동 제어에 관한 실증 실험을 실시한 바 있다.
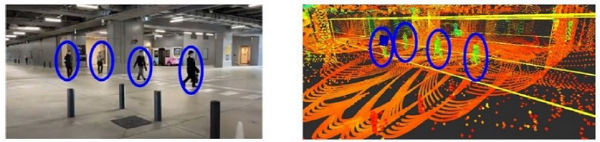
▲ 디지털 트윈으로 로봇 주행 구역에서 보행자의 접근 상황을 감지할 수 있다.
당시 실증 경험을 토대로 이뤄진 이번 실증 실험에선, HDT의 기술을 바탕으로 실시간으로 구축된 디지털 트윈에서 추출된 공간 정보를 가시마의 로봇통합관제시스템에 통보함으로써 도로를 횡단하는 로봇을 자동 제어할 수 있도록 했다.
우선 도로내 주요 건물에 복수의 라이다를 설치하고, 라이다로부터 취득한 로봇 주변의 동체(사람, 차량 등) 데이터를 엣지컴퓨터로 해석해 디지털 트윈을 구축했다. 이어 디지털 트윈에서 로봇에 필요한 공간 정보를 추출해 로봇용 3D맵을 자동으로 생성 및 갱신하고 공유하도록 했다. 이에 따라 로봇은 처음으로 주행하는 장소라고 하더라도 자체 카메라나 센서로부터 취득한 정보뿐만 아니라 3D맵을 활용해 사각지대나 멀리에서 접근하는 차량이나 사람도 인식할 수 있어 충돌을 막을 수 있다.
향후 4개 기업 및 기관은 ‘하네다 이노베이션 시티’를 테스트베드로 삼아 실증 실험을 계속 실시해 기능을 확장하고, 보다 안전한 서비스를 제공하고 다른 대규모 시설에도 확대한다는 계획이다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'로봇부품·소프트웨어' 카테고리의 다른 글
| 공기흐름까지 감지하는 ‘전자피부’ 등장 (0) | 2025.01.21 |
|---|---|
| 美 아이노스, 인공지능 코 기술 보급 '아이노스 얼라이언스 이니셔티브' 시작 (0) | 2025.01.15 |
| 中 과기대, 코끼리 코ㆍ문어 촉수 닮은 소프트 로봇 개발 (0) | 2025.01.15 |
| 中 허싸이, 'CES 2025'서 로봇용 미니 3D 라이다 선봬 (0) | 2025.01.13 |
| 美 심비, 고정된 장소용 카메라 ‘탤리 스팟’ 출시 (1) | 2025.01.13 |