그동안 4족 보행 로봇은 비행기를 끌거나 울타리를 오르는 등 인상적인 업적을 달성했지만, 아직도 여러 가지 한계를 지니고 있다. 특히 이런 종류의 로봇 대부분은 보행을 위해 넓은 공간을 필요로 한다. 이에 이탈리아 기술원(the Instituto Italiano di Tecnologia·IIT) 연구팀이 최근 4족 보행 로봇이 균형을 유지하며 좁은 공간을 걷도록 해주는 '로봇 컨트롤러'를 개발했다고 엔가젯 등 매체들이 보도했다.
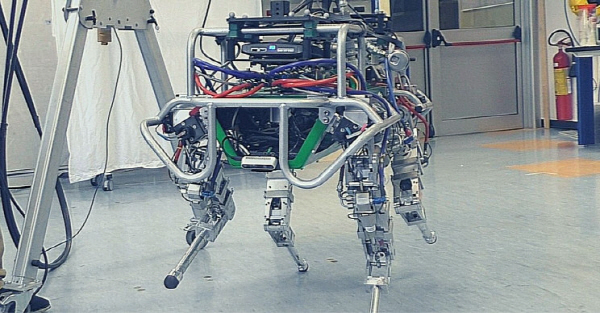
IIT 연구팀은 이 컨트롤러를 실제 4족 로봇에 적용했다. 이 로봇은 HyQ라는 4족 보행 로봇으로, 무게가 90kg에 달하는데도 불구하고 2개의 다리로 균형을 잡을 수 있다. 심지어 사람이 밀쳐내도 두 발로 균형을 유지하며 쓰러지지 않는다. 디지털 시뮬레이션에선 6cm 너비의 다리를 건너기도 했다. 연구팀은 이번 연구결과를 출판전(pre-printed) 논문·자료 저장소인 ‘아카이브(arXiv, arxiv.org)’에 자세히 설명했다. 아래 영상을 통해 로봇이 균형을 유지하고 좁은 다리를 건너는 모습을 확인할 수 있다.
|
||||||||||||
| <저작권자 © 로봇신문사 무단전재 및 재배포금지> | ||||||||||||

'로봇부품·소프트웨어' 카테고리의 다른 글
| 에이디링크, AI 머신 비전을 위한 AI 스마트 카메라 출시 (0) | 2020.07.22 |
|---|---|
| 클라우드 로봇 시장, 2030년 1578억 달러 규모로 성장 (0) | 2020.07.13 |
| 로봇관리SW 스타트업 '인오빗' 260만 달러 투자 유치 (0) | 2020.07.13 |
| 독일 시크, 초소형 '파워프록스' 근접센서 내놨다 (0) | 2020.07.13 |
| 조달청, 로봇프로세스 자동화(RPA) 기술 도입 추진 (0) | 2020.07.03 |