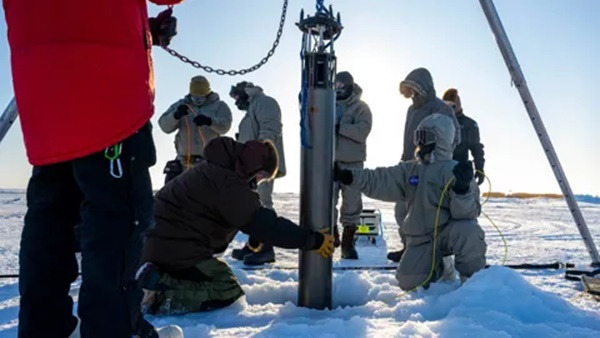
▲미항공우주국(나사)의 극지방 빙상이 녹는 것(융빙·融氷)을 측정하는 자율 수중 로봇인 ‘아이스노드’(IceNode)를 배치하고 있다. (사진=미해군)
미 항공우주국(NASA·나사)이 극지방의 얼음 밑면에 붙어서 빙붕(氷棚·ice shelf), 즉 빙하나 빙상이 바다를 만나 이루고 있는 큰 얼음으로 된 평지나 그런 얼음 지형이 녹는(融氷,융빙) 속도를 측정할 수 있는 자율 로봇을 개발했다고 디엔지니어가 최근 보도했다.
아이스노드(IceNode)로 알려진 이 프로젝트는 나사의 제트추진연구소(JPL)가 주도하고 있다. JPL 엔지니어들은 우주 환경용 차량 설계에 대한 전문 지식을 활용해 길이 약 2.4m, 지름 25cm인 로봇을 개발했다.
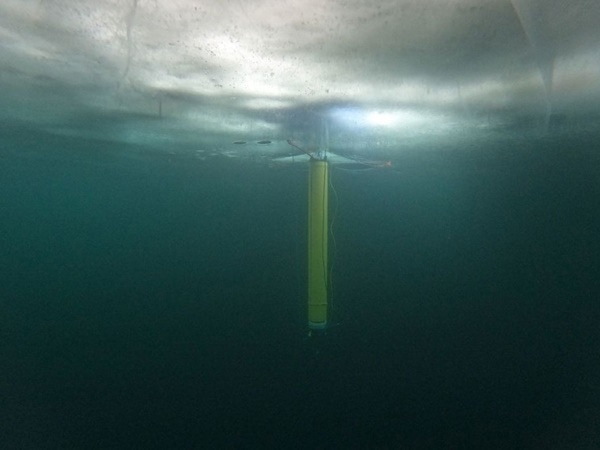
▲나사의 자율 수중 로봇인 ‘아이스노드’가 극지방의 빙붕 아래에서 융빙을 측정 중인 모습. (사진=미해군)
다리가 3개인 아이스노드는 한쪽 끝에서 튀어나온 ‘랜딩 기어’를 가지고 있어 자체 추진장치 없이도 로봇을 얼음 밑면에 밀착시킬 수 있다.
JPL에 따르면 로봇은 해류를 모델링하는 새로운 소프트웨어를 사용해 자율적으로 자신의 위치를 잡을 수 있다.
아이스노드는 떠다니는 빙붕, 바다, 육지가 만나는 ‘접지 구역’(grounding zone), 즉 ‘빙하와 해저가 맞닿는 지점’을 조사하기 위해 개발돼 왔다.
위성 측정이 불가능한 접지 구역은 빙붕 녹는 실제 속도에 대한 통찰력을 제공할 수 있으며, 이를 통해 육지와 연결된 빙상(ice sheet)이 녹는 속도를 더 정확히 추정할 수 있다. 남극 대륙의 빙상이 완전히 녹으면 전 세계 해수면이 약 60m 상승할 것으로 추정된다.
JPL 기후 과학자이자 아이스노드의 과학 책임자인 이언 펜티는 “우리는 수년간 이러한 기술적, 물류상의 과제를 극복하는 방법을 고민해 왔고, 그 방법을 찾았다고 생각한다. 목표는 빙상 아래의 얼음 바다가 녹는 경계면에서 직접 데이터를 얻는 것이다”라고 말했다.
아이스노드 로봇은 열린 바다의 시추공이나 선박에서 방출돼 해류를 타고 빙붕 아래에 이른다. 그런 다음 로봇은 밸러스트(바닥짐)를 떨어뜨리고 상승해 얼음 바닥에 달라 붙는다.
센서들은 따뜻하고 짠 바닷물이 얼음을 녹이기 위해 얼마나 빨리 순환하는지, 그리고 더 차갑고 신선한 녹은 물이 얼마나 빨리 가라앉는지 측정한다. 로봇은 최대 1년 동안 데이터를 수집한 후 얼음에서 분리돼 열린 바다로 돌아와 위성을 통해 자신들이 수집한 데이터를 전송한다.
JPL 로봇 공학자이자 아이스노드의 수석 연구원인 폴 글릭은 “이 로봇은 지구상에서 가장 접근하기 어려운 곳으로 과학 기기를 운반하는 플랫폼이다. 어려운 문제에 대한 안전하고도 비교적 저렴한 솔루션이 될 것이다”라고 말했다.
아이스노드 로봇은 앞서 캘리포니아 몬터레이 만과 미 북부 5대호 중 하나인 슈피리어 호의 얼어붙은 겨울 호수면 아래에 배치된 후, 올해 3월에 알래스카 보퍼트해에서 테스트됐다. 이 로봇은 이 첫 번째 극지방 테스트에서 바다속 약 100m 아래로 내려가 염도, 온도 및 해류에 대한 데이터를 수집했다.
폴 글릭 연구원은 “우리는 진행 상황에 만족한다. 시제품 개발을 진전시키고 북극 해빙 아래에서의 미래 테스트를 위해 로봇들을 북극으로 되돌려 보내고, 궁극적으로 남극 대륙 빙붕 아래에 완전한 로봇군(群)을 배치하는 것이 목표다”라고 밝혔다.
이성원 robot3@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 中 스피리트AI, 다중 작업 범용 휴머노이드 로봇 공개 (5) | 2024.09.04 |
|---|---|
| 엔도로보틱스, 수술로봇 '로보페라' 해외 임상시험 성공 (0) | 2024.09.04 |
| 노르웨이 1X, 올연말 가정용 ‘네오 베타’ 휴머노이드 시범 배치 (8) | 2024.09.04 |
| 아마존, 스위스 로봇 스타트업 '스위스-마일'에 투자 (1) | 2024.09.04 |
| 日 YKK AP, 창문 시공 로봇 '마봇' 개발 (0) | 2024.09.04 |