일본 이시카와현에 위치한 국립대학인 호쿠리쿠선단과학기술대학원대학(北陸先端科学技術大学院大学, JAIST) 호아인반(Ho Anh Van) 교수팀이 문어의 촉수, 코끼리의 코에서 영감을 얻어 높은 유연성을 갖는 '연속체 로봇(continuum robot)'을 개발했다고 6일 밝혔다.
JAIST 연구팀은 이들 동물의 자연적인 구조에서 영감을 받아 견고성과 안전성을 동시에 제공하는 유연한 연속체 로봇을 개발하는 것을 목표로 했다.
이상적인 측면에서 연속체 로봇은 대부분 작업에 필요한 것보다 많은 자유도와 관절의 수를 특징으로 한다. 이러한 특성은 로봇이 모양(shape)을 동적으로 조정하고 수정할 수 있도록 함으로써 장애물과 예기치 않은 상황을 회피할 수 있도록 해준다. 그러나 로봇의 복잡한 동작은 로봇의 모양과 움직임을 특징화하는 것을 어렵게 만든다.
연구팀에 따르면, 연속체 로봇의 운동학적 또는 동적인 문제를 해결하기위한 기존의 분석 기법은 복잡한 모델링에 의존하기 때문에 컴퓨팅 비용이 증가한다.
대안으로, 연속체 로봇에 내장된 유연한 센서를 활용해 모양과 움직임을 추적할 수 있지만, 이 방법은 많은 저해상도 센서를 필요로 한다. 연속체 로봇의 끝에 단일 감지 모듈을 사용하는 것이 유망한 방법으로 제시되고 있지만, 기존의 연구는 대부분 로봇의 자세에 초점을 맞추고 있으며, '접촉 감지'에 대해선 다루지 않았다고 설명했다.
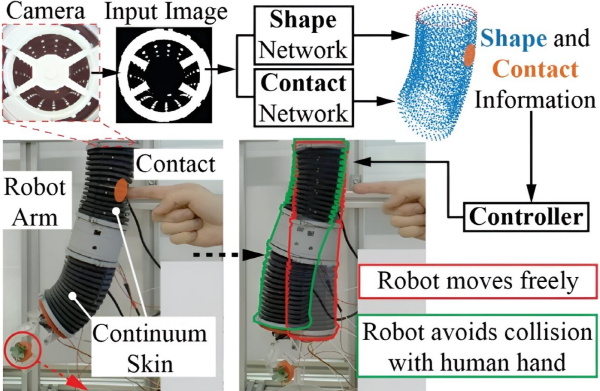
호아인반 교수팀은 이같은 격차를 해소하기위해 ‘콘택(ConTac)’이라는 새로운 시스템을 개발했다. 이 시스템은 부드러운 피부(soft skin)를 가진 로봇 팔의 모양과 접촉을 추정할 수 있다.
호아인반 교수는 “이 시스템의 궁극적인 목표는 연속체 로봇에 구현되는 것이지만, 이번 연구에선 관절을 갖고 있는 로봇 팔과 부드러운 피부를 사용한 지각(인식)에 초점을 맞추었다"라고 설명했다.
연구팀은 이번 연구 성과를 지난달 15일부터 19일까지 네덜란드 델프트공대에서 열린 ’RSS(Robotics: Science and Systems) 2024’에서 발표했다. 이번 연구에는 베트남 하노이에 위치한 VNU-UET대학 디잉 쿠앙 응우옌 박사도 참여했다.

▲연속체 로봇의 구성

▲ 연속체 로봇의 구성과 디지털 트윈
연구팀이 개발한 ‘콘택(ConTac)’ 시스템은 ▲연속체 로봇의 굽힘을 모방한 백본 ▲마커가 있는 부드러운 피부 ▲피부 변형을 관찰하는 카메라 ▲피부의 모양과 접촉 감지 모델 ▲ 접촉 인식 제어 체제 등으로 구성되어 있다. 콘택 장치는 백본과 부드러운 피부를 가진 '연속체 에뮬레이트 로봇 팔'이다. 연구팀은 컨트롤러도 개발했는데, 이 컨트롤러는 지각 정보를 사용하여 로봇 팔의 동작을 안내한다. 콘택 장치는 비용 효율적이고 전통적인 재료로도 제작될 수 있다.
이 시스템은 부드러운 연속체 피부의 '모양 재구성(shape reconstruction)'과 '접촉 감지(contact detection)'를 위해 두개의 딥러닝 모델을 활용했다. 모양과 접촉에 관한 정보가 컨트롤러에 제공된다.
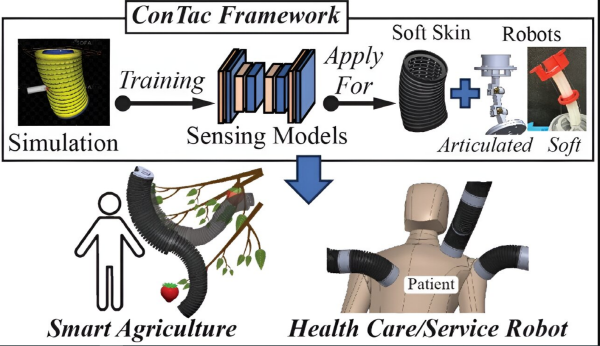
▲콘택 시스템은 의료나 스마트 농업에 활용할수 있다.
호 교수는 "콘택 시스템은 복잡한 조정 과정 없이 다양한 로봇 시스템에 사용되는 것을 목표로 만들어졌다. 이 시스템이 장착된 유연한 로봇 팔은 장애물이 있는 환경을 탐색하고, 인간과 안전하게 상호 작용해야 하는 스마트 농업 및 의료 서비스에 이상적이다. 주변 환경을 감지하는 능력과 결합된 로봇팔의 부드러움과 유연성은 식물 및 환자와 상호작용하는 데 완벽하다"고 말했다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 브이디컴퍼니, 오비맥주와 손잡고 로봇 기반 광고 진행 (0) | 2024.08.08 |
|---|---|
| 로엔서지컬, 신장결석 수술로봇 자메닉스 경북대병원에 첫 도입 (0) | 2024.08.08 |
| 피규어 AI, 2세대 휴머노이드 로봇 '피규어 02' 공개 (0) | 2024.08.07 |
| SKT, 텔코 에지 AI 기반 자율주행 로봇 기술 실증 (0) | 2024.08.07 |
| 영국 핀스트로보틱스, 200만파운드 투자 유치 (0) | 2024.08.07 |