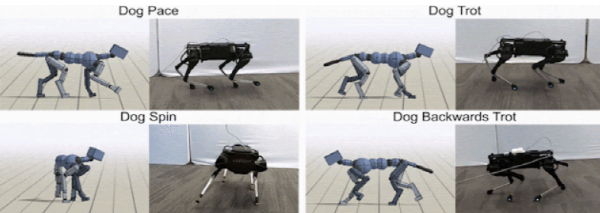
실제 개의 민첩한 동작을 학습할 수 있는 4족 보행 로봇용 인공지능 시스템이 개발됐다. ‘구글 AI 블로그’에 따르면 구글 연구진은 4족 보행 로봇(로봇 개)이 실제 개의 각종 동작을 따라 배울 수 있는 인공지능 시스템을 개발했다. 실제 개로부터 동작을 학습할 수 있는 인공지능이 개발되면 4족 보행 로봇의 동작을 일일히 프로그래밍할 필요가 없다. 연구진은 이 인공지능 시스템을 물류창고나 고객배송센터 등에서 물품을 옮길 수 있는 로봇을 개발하는데 적용할 수 있을 것으로 보고 있다. 연구팀이 개발한 인공지능 프레임워크는 실제 개의 동작에 관한 이미지 클립을 이용해 학습한다. 학습 방법은 보상을 제공하는 방식으로 목표 행동을 유도하는 '강화학습(RLㆍreinforcement learning)'이다. 연구팀은 상이한 레퍼런스 동작을 훈련하는 방법으로 중국 유니트리의 4족 보행 로봇인 ‘라이카고(Laikago)’에게 학습을 시켰다. 라이카고는 보행, 속보, 회전, 옆걸음질, 제자리 뛰기, 뒷걸음질 등 여러 동작을 시뮬레이션과 실제 환경에서 훈련했다.
이번 연구를 위해 연구팀은 민첩한 동작을 실행하는 실제 개에 관한 데이터셋을 수집해 컴파일하고, 2억개에 달하는 샘플을 활용해 시뮬레이터상에서 로봇이 모방 학습을 하도록 했다. 그러나 시뮬레이터상에선 실제 세계에 근접할 만한 동작을 구현하지는 못했다. 이 문제를 해결하기 위해 연구진은 4족 보행 로봇의 체적(부피), 마찰력 등에 변화를 주면서 '역동성'을 랜덤화하는 '적응 기술(adaptation technique)'을 채택했다. 연구팀은 “보행 로봇의 다양한 동작들을 구현하기 위해 레퍼런스 모션 데이터를 활용해 제어기를 자동으로 생성했다”며 "시뮬레이터상에서 학습한 적응적인 정책(adaptive policies)을 실제 환경에서 빠르게 적용할 수 있다“고 말했다. 연구팀은 앞으로 제어기의 강건성(robustness)을 제고하고 비디오 클립 같은 다른 모션 데이터를 활용해 학습시킬 수 있는 프레임워크를 개발한다는 계획이다. | |||||||||||
| <저작권자 © 로봇신문사 무단전재 및 재배포금지> | |||||||||||

'인공지능' 카테고리의 다른 글
| 이모션웨이브, 올 하반기에 로봇 노래방 첫 선 (0) | 2020.04.13 |
|---|---|
| 기재부 구윤철 제2차관 "AI 인재양성 선도모델, 내년 예산안 반영" (0) | 2020.04.09 |
| 서울시, 인공지능산업에 기술사업화 자금 39억원 지원 (0) | 2020.04.08 |
| KAIST, 스스로 그림 그리는 인공지능 반도체 칩 개발 (0) | 2020.04.07 |
| 팬텀AI, 2200만달러 규모의 시리즈A 투자유치 (0) | 2020.04.06 |