홍콩과기대 연구진이 촉각 기능을 갖춘 컴퓨터 비전 기반 '로봇 발(foot)'을 개발했다고 테크익스플로어가 보도했다. 촉각을 갖춘 로봇 발을 로봇 다리와 연결하면 이동 중에도 로봇의 균형과 안정성을 증가시킬 수 있다는 설명이다.
연구진에 따르면 휴머노이드 로봇이나 2족 보행 로봇들은 다리가 진자처럼 흔들리는 구조를 갖고 있기 때문에 균형을 유지하면서 빠르고 자유스럽게 움직이는 게 쉽지 않다.
이번 연구를 수행한 ‘구안란 장(Guanlan Zhang)은 "우리의 논문은 다리가 달린 로봇에 비전 기반의 촉각 감지 능력을 제공하는 것에 초점을 맞추고 있다"며 "촉각과 햅틱 감지 능력이 환경과 인간의 상호작용에 중요한 역할을 한다는 생각에 바탕을 두고 있다"고 말했다.
연구팀은 마이클 Y. 양 교수의 지도아래 사람처럼 지면의 느낌을 인지할 수 있는 로봇 발을 개발하는데 힘을 기울였다. 지면을 감각적으로 느끼면서도 몸의 균형을 잡을 수 있는 로봇이다. 이를 구현하기위해 연구팀은 로봇의 발 밑에 부드러운 인공 ‘피부’를 삽입하고, 피부 상단에 카메라를 설치했다. 이어 피부 내부에 특수 패턴을 그리고, 카메라가 패턴을 포착할 수 있도록 했다. 연구팀은 "발이 지면에 닿으면 인공 피부는 외력에 의해 변형된다. 패턴의 변형을 카메라를 통해 인지하면 발과 지면의 접촉각, 다리의 기울기 등의 접촉 정보를 얻을 수 있다"고 말했다.
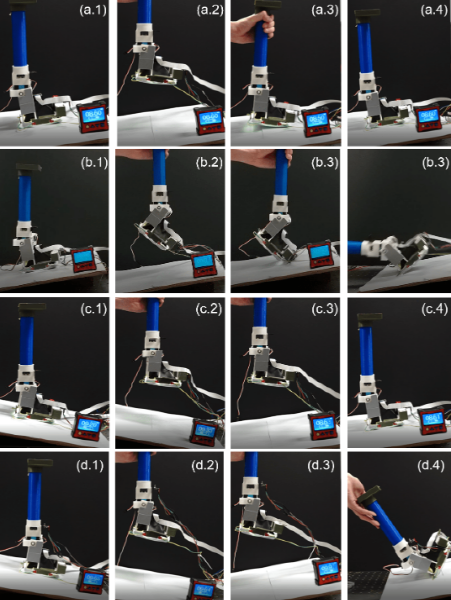
연구진이 개발한 인공 발은 기존 센서보다 로봇이 걷고 있는 지면에 대해 훨씬 풍부한 정보를 수집할 수 있다. 이 정보는 로봇의 안정성을 향상시키는 데 활용된다. 인공 발로 수집한 이미지를 접촉 관련 데이터로 변환하기 위해 연구진은 새로운 딥러닝 프레임워크를 활용했다. 이어 로봇 발을 로봇 다리와 통합해 안정성을 평가하는 테스트를 수행했다.
연구팀이 촉각 로봇 시스템의 전반적인 타당성과 효과를 시험하기 위해 일련의 실험을 진행한 결과 기존의 단일 다리 로봇 시스템을 크게 능가해 균형과 안정성을 입증한 것으로 나타났다. 연구팀은 이번에 개발한 로봇 발이 다양한 특성의 지면을 보행할 때 안정성을 유지할 수 있는 다리를 갖춘 로봇을 개발하는 데 사용될 수 있을 것으로 보고 있다. 또 보다 복잡한 다리 움직임과 운동 스타일을 구현한 휴머노이드 로봇의 개발도 가능할 것으로 기대하고 있다. |
||||||||||||
| <저작권자 © 로봇신문사 무단전재 및 재배포금지> | ||||||||||||

'미래기술' 카테고리의 다른 글
| 쿼너지 시스템즈, 완도 명사십리 해수욕장에 라이다 설치 (0) | 2021.08.12 |
|---|---|
| "군집 로봇, 커뮤니케이션 축소하면 더 좋은 의사결정 내린다" (0) | 2021.08.05 |
| 아르고 AI, 400m 떨어진 물체 인식 가능한 라이더 개발 (0) | 2021.05.10 |
| 獨 윙콥터, 한번 뜨면 3곳 배송 서비스용 드론 개발 (0) | 2021.05.03 |
| 스페인, 골격근 기반 '바이오하이브리드 소프트 로봇' 개발 (0) | 2021.04.26 |