|
'젊은 로봇공학자(Young Robot Engineer)' 코너는 한국로봇학회와 로봇신문이 공동으로 기획한 시리즈물로 미래 한국 로봇산업을 이끌어 갈 젊은 로봇 공학자를 발굴해 소개하는데 있다. 38번째 인터뷰는 세종대 최유경 교수다. 1982년생인 최 교수는 숭실대에서 전기전자공학으로 학사, 연세대에서 전기전자공학으로 석사, 2018년 2월 KAIST에서 전기전자공학/로보틱스 프로그램으로 박사 학위를 받았다. 그후 2018년 9월부터 현재까지 세종대 조교수로 근무하고 있다. 2002년 12월~2003년 1월 POSTECH 시스템소프트웨어랩 리서치 인턴, 2003년 8월~2007년 2월 삼성SW멤버십 소프트웨어 엔지니어 인턴, 2008년 3월~2010년 1월 KIST 지능로봇연구센터 연구원, 2017년 3월~2017년 8월 삼성전자 DMC R&D센터 리서치 사이언티스트, 2017년 9월~2018년 8월 네이버 Search & Clova 리서치 사이언티스트 등 다양한 연구경력을 가지고 있다.
Q. 세종대 지능기전공학부에 대한 소개 부탁 드립니다.
지능기전공학(Intelligent Mechatronics)은 인공지능과 기계전자공학을 결합한 공학 기술을 의미합니다. 세종대학교 지능기전공학부는 인공지능 기술을 이용해 외부환경을 인식하고 스스로 상황을 판단한 후 이동하는 “무인이동체공학”전공과 인공지능 기술을 다양한 사물과 기기에 접목해 유용한 서비스를 제공하는 “스마트기기공학” 으로 나누어집니다. 제가 몸담고 있는 지능기전공학부는 자율주행차, 드론, 무인선박, 잠수정 등의 무인이동체 기술과 사물인터넷, 웨어러블, 지능형 로봇 등 스마트 기기 기술을 선도할 창의적인 인재 양성을 목표로 하고 있습니다.
Q. KAIST에서 "Visual Perception for Autonomous Driving"라는 제목으로 박사 학위를 받으셨는데 어떤 내용인지 소개 부탁드립니다.
자동차와 로봇이 스스로 정해진 목적지까지 주행하기 위해서는 센싱(Sensing), 맵핑(Mapping), 그리고 주행 전략(Driving Policy)이라는 3가지 요소가 반드시 필요합니다. 이러한 3요소는 행동 제어(Action)를 위한 기술과 시각 인지(Perception)를 위한 기술로 구별되어지며, 행동 제어를 위해서는 반드시 시각 인지 기술이 선행되어야 합니다. 제 학위 논문에서는 시각 인지 기술과 관련성이 깊은 센싱과 맵핑 기술을 핵심 연구 주제로 다루었으며, 주야간을 위한 센싱 기술을 확보하고, 빠르고 정확한 매핑 기술을 확보하기 위해 데이터 드라이븐(data-driven) 방식의 딥러닝 기술로 물리적인 센서 기술의 한계를 극복하려고 노력했습니다. 학위 논문에서 집중했던 핵심 연구 주제는 크게 “주야간 모든 시간대에 활용할 수 있는 비전 기반 센싱 기술”과 “빠르고 가벼운 자기 위치 인식을 위한 맵핑 기술” 로 요약할 수 있습니다.
Q. 최근 하고 계신 연구가 있다면 소개 부탁드립니다.
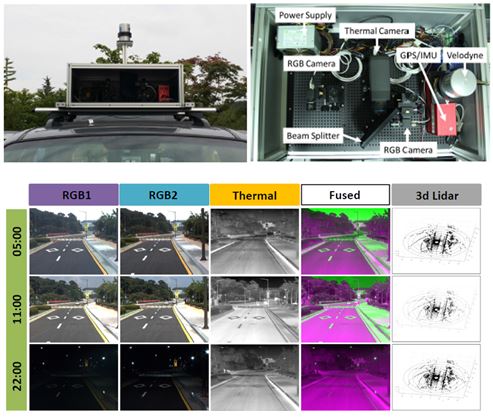
최근 하고 있는 연구들은 박사학위 논문과 동일선상에 있습니다. 먼저 “주야간 모든 시간대에 활용할 수 있는 비전 기반 센싱 기술”의 완성도를 높이기 위해 A.I.(Artificial Intelligence, All in one, All in a day) 카메라 연구를 지속하고 있습니다. 제가 도전하고 있는 궁극의 센싱 기술은 열화상 센서를 사용하여 주야간에 관계없이 우리가 일상에서 접하는 칼라 영상(pseudo-RGB)을 획득할 수 있는 궁극의 카메라를 만드는 것입니다. 해당 연구의 1차적인 컨셉은 2018년 전미인공지능학회 (AAAI: Association for the Advancement of Artificial Intelligence)에서 처음 소개되었고, 해당 기술은 그 가치를 인정받아 삼성전자가 주최하는 제23회 휴먼테크논문대상 금상을 수상하기도 했습니다.
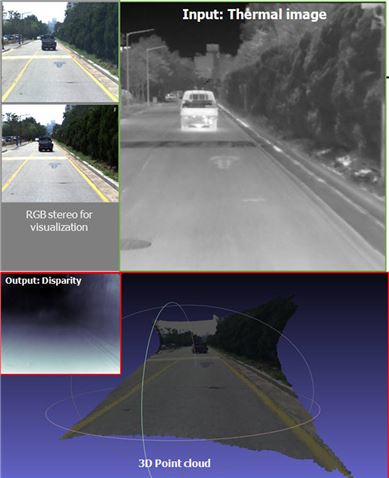
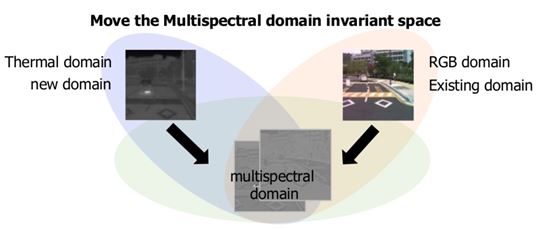
다음으로는 “주야간 모든 시간대에 활용할 수 있는 카메라 기반 위치 인식 기술”을 연구하고 있습니다. 기존의 카메라 기반 위치 인식 (Visual Localization) 기술은 칼라 카메라를 센서로 사용하기 때문에 야간과 같이 광량이 부족한 경우 위치 인식 알고리즘이 강인하게 동작하지 못한다는 단점이 있습니다. 이러한 어려움을 해결하기 위해 저희 연구팀은 주야간에 관계없이 사용할 수 있는 열화상 이미지 기반의 위치 인식 기술을 제안하였습니다. 제안된 기술은 단순히 칼라 카메라 기반의 위치 인식 기술의 입력 센서를 변경한 것이 아니며, 위치 인식에 사용되는 기존 지도(map)는 동일하게 사용하고 위치 인식용 지도를 재구성하기 위한 별도의 노력 없이 입력 데이터만 주야간에 강인한 열화상 센서로 변경하는 연구에 해당됩니다. 해당 연구는 열화상 이미지와 칼라 이미지의 도메인 적응(domain adaptation)문제의 시도에 해당되며, 결과는 올해 5월에 열렸던 국제로봇자동화학술대회(ICRA: International Conference on Robotics and Automation)를 통해 발표 되었습니다.
Q. 자율주행 기술이 일반화 되기 위해서는 비전이나 비주얼 퍼셉션 분야가 가장 중요한 분야가 아닐까 생각합니다. 많은 회사들이 자율주행 기술을 개발하고 있는데 언제쯤 완전 자율주행자동차의 상용화가 가능한지, 그리고 가장 큰 애로 기술은 무엇인지 궁금합니다. 자율주행기술은 미국자동차기술학회(SAE)기준에 따라 레벨0에서부터 레벨5까지 나눌 수 있습니다. 최근 많은 회사들의 노력으로 자율주행 레벨3에 해당하는 기술은 주변에서 많이 접할 수 있습니다. 하지만 완전 자율주행이 언제쯤 완성될 것인가에 대한 의견은 연구자들마다 의견이 다양하고 분분합니다. 기술의 완성도는 98% 도달하는 시간과 노력 대비 남은 2%를 채워 완성도를 100%까지 끌어올리는 필요한 시간과 노력이 더욱 크다고 합니다. 따라서 자율주행자동차의 상용화가 정확히 몇 년 안에 이루어 질 것이라 감히 말할 수는 없으며, 지금 그 단계를 논의하기에는 시기상조인 것은 분명합니다.
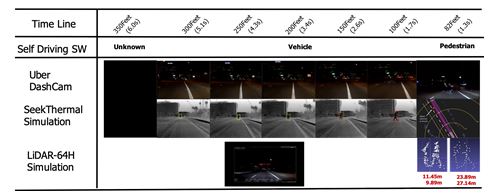
아직 해결하지 못한 문제 중 하나의 예는 2019년 봄에 있었던 '우버의 자율주행차 보행자 사망 사고'를 통해 살펴볼 수 있을 것 같습니다. 미 연방교통안전위원회(NTSB)의 보고서에 따르면 우버의 센서 시스템 중 라이다와 레이다는 충돌 6초전 장애물이 있음을 감지했으나 당시에는 인식 SW에 의해 “알수 없음” 이라고 인식되었고, 아쉽게도 충돌 1.3초전 차량 앞 대상을 “보행자”로 인식하였다고 합니다. 즉, 해당사고는 인식 SW의 오류로 발생한 사망사고로 보고되고 있는데요. 이와 같이 조명이 어두운 밤이나 눈, 비 등이 내리는 악천후 등의 열악한 환경에서까지 완벽하게 자율주행자동차가 정상 동작해야 상용화가 논의 될 수 있을 것입니다. 그럼에도 불구하고, 완전자율자동차를 향해 나아가는 기술의 중간 기술들은 분명 우리 삶 속에서 상당한 편안함을 선사 할 것이라고 생각합니다.
Q. 로봇을 하시게 된 동기가 있다면?
저는 기계공학을 전공하였으나 젊은 시절 컴퓨터 프로그래밍을 좋아하셨던 아버지의 영향으로 로봇공학을 전공으로 선택하기에 필요한 다양한 요소에 노출될 수 있었던 거 같습니다. 유년시절에 이미 로봇이라는 학문에 익숙해서 인지 대학시절 학술소모임 활동의 많은 부분을 로봇제작과 제어에 시간을 보냈고, 삼성 SW 멤버십 활동을 하면서도 많은 시간을 반신반마 로봇 제작에 힘을 쏟았습니다.
이런 커리어는 저를 KIST 인지로봇연구단 비전팀으로 이끌었고 프로티어사업의 일환으로 당시 국내 로봇연구자로 성장하기 위한 많은 지원을 받으면서 자연스럽게 국내 로봇 비전 전문가로 성장하고 싶은 꿈을 더욱 구체적으로 그리게 된 것 같습니다.
Q. 여러 가지 연구를 하고 계신데 연구를 하면서 가장 어려운 부분은 무엇인지요? 자율주행자동차 관련 연구원들은 칼라 카메라와 라이다/레이더를 메인 센서로 사용하기 때문에 관련분야 연구자들에게 열화상 카메라는 익숙하지 않은 센서입니다. 더욱이, 제가 제안하고 사용하는 열화상 중심의 센서 퓨전 시스템이 학계에 생소한 센서 조합과 방법론이다보니 주변 동료들에게 해당 연구방향의 필요성을 설명하고, 함께 하자고 설득하는 것이 가장 어려웠던 거 같습니다.
Q. 연구자로서 앞으로의 꿈과 목표가 있다면?
연구자로서의 꿈은 먼저 A.I. 카메라를 완성하는 것입니다. 제가 꿈꾸는 A.I. 카메라는 “인공지능 기반(Artificial Intelligence) 카메라, 올인원 (All-in-one) 카메라, 언제든지 사용가능한(All in a day)카메라” 라는 의미를 담고 있는 궁극의 카메라를 의미합니다. 학위과정동안 집중했던 “주야간 모든 시간대에 활용할 수 있는 비전 기반 센싱 기술”의 완성도를 높여 A.I.카메라를 반드시 완성하고 싶습니다. 그리고 이렇게 만들어진 A.I. 카메라를 기반으로 로봇 및 자율주행자동차 분야의 시각 인지 기술력 향상에 기여하고 싶습니다.
Q. 로봇공학을 연구하려는 학생들이 늘어나고 있습니다. 그러기 위해서는 어떤 준비와 노력이 필요한지 후배들에게 조언을 해주신다면?
로봇공학은 여러분야가 융합되어 있는 종합적인 학문이며, 다른 분야 대비 진입장벽이 높아 배워야하는 지식의 양이 많고 다양하다고 생각합니다. 따라서 많은 분야가 그렇겠지만, 로봇공학 역시 로봇 자체를 좋아하지 않을 경우 이러한 진입 장벽을 쉽게 넘지 못하는 것 같습니다.
“열정-협업-끈기를.”
로봇 공학을 연구하기 희망하는 후배들에게 드리고 싶은 조언은 첫째, 자기 동기 부여와 연구에 대한 열정을 놓지 말고, 두번째, 다른 동료들과 함께하려는 협업 자세를 위해 노력하며, 세번째로, 어떤 어려움에도 포기하지 않는 끈기를 가져 달라는 것입니다. 로봇을 좋아하는 마음, 그리고 로봇으로 세상을 변화시키겠다는 의지는 이 글을 보고 있는 후배님들을 멋진 로봇공학자로 만들어 줄 것이라 확신합니다.
Q. 연구에 주로 영향을 받은 교수님이나 연구자가 계시다면...
좋은 연구자로서 성장하는데 영향을 주신 분은 제 박사학위 지도교수님이신 권인소 교수님이십니다. 연구자들이 세상에 기여할 수 있는 방식은 다양할 수 있습니다. 그러나 권인소 교수님은 본인 제자들이 "세상에 필요한 문제를 정의하고, 문제의 해결책을 제시하는 연구를 통해 분야를 이끄는 리더형 연구자"로 성장하길 바라셨습니다. 제자 개개인이 자신만의 연구라는 성을 쌓아 가는 과정동안 철학이 담기지 않은 실적을 위한 연구 주제에 대해서는 비판도 서슴지 않으셨습니다. 이런 높은 스탠다드를 요구하시던 지도교수님 덕분에 지금도 저 스스로를 돌아보며 오늘의 나는 여전히 리더형 연구자로 성장하고 있는가 질문하곤 합니다.
|
||||||||||||||||||||||||||||||||||||||||||
| <저작권자 © 로봇신문사 무단전재 및 재배포금지> | ||||||||||||||||||||||||||||||||||||||||||



'인물연구' 카테고리의 다른 글
| '젊은 로봇 공학자' (40) 경북대 조현민 교수 (0) | 2020.08.31 |
|---|---|
| '젊은 로봇 공학자' (39) UNIST 오현동 교수 (0) | 2020.08.04 |
| '젊은 로봇 공학자'(36) KIST 양성욱 박사 (0) | 2020.05.15 |
| '젊은 로봇 공학자'(35) 현대로보틱스 김종원 책임연구원 (0) | 2020.04.22 |
| '젊은 로봇 공학자'(34) 영남대 김태균 교수 (0) | 2020.03.30 |