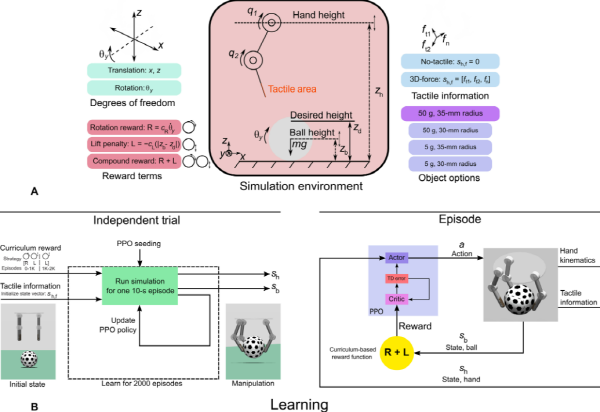
▲ 자율 조작에 대한 시뮬레이션 환경 및 학습 접근 방식에 대한 개괄적인 개요
로봇핸드나 의수로 공(물체)을 잡고 손안에서 능숙하게 회전하는 동작은 학습 과정이 매우 어렵다. 물체에 적당한 힘을 가하기위해 손가락을 제어하는 방법을 학습해야 한다. 로봇공학자들은 사람의 손을 덮고 있는 민감한 피부와 신경들이 물체를 조작하는 법을 배우고 적응하는 데 도움을 주기 때문에 로봇핸드에 센서를 탑재해야 한다고 주장해왔다. 하지만 사람들은 장갑을 낀 상태에서도 물체를 다루는 법을 배울 수 있다.
과학계에선 사람의 이같은 사람의 능력을 ‘본성 대(對) 양육(nature versus nurture)’의 문제로 정의한다. 비록 촉각이 없다라도 훈련을 통해 얼마든지 능숙한 조작 능력을 가질 수 있다는 의미다.
남캘리포니아대(USC) 연구팀은 촉각이 손가락 제어 학습에 항상 필요한지를 연구하고 있다. 연구팀은 로봇핸드의 일부인 센서와, 복잡한 작업을 학습하도록 훈련하는 방식이 어떻게 상호 작용하는지에 대해 탐구했다. 여기서 센서는 ‘본능(nature)’을, 그리고 훈련은 ‘양육(nuture)’을 의미한다.
연구팀은 전문 학술지인 ‘사이언스 어드밴시스’에 실린 논문에서 계산 모델링과 머신러닝을 사용하여 '본성 대 양육'이라는 고전적인 문제를 다뤘다. (논문 제목:Curriculum is more influential than haptic feedback when learning object manipulation). 이 논문은 손의 진화 및 인공지능과 관련된 연구실의 기존 연구를 기반으로 하고 있다.
연구팀은 세 개의 손가락을 가진 로봇핸드를 사용해 강화학습을 통해 다양한 커리큘럼과 촉각 정보 조건에서 물체 조작 능력을 비교했다. 그 결과, 학습 순서인 '커리큘럼'의 선택이 학습 경로와 최종 성능에 큰 영향을 미쳤으며, 로봇핸드가 불완전하거나, 심지어 촉각 정보가 없더라도 효과적인 학습이 가능하다는 점을 발견했다. 이러한 결과는 복잡한 작업을 학습할 때 커리큘럼 설계의 중요성을 강조하며, 촉각 정보의 필요성에 대한 기존의 관점을 재고하게 한다.
연구팀은 로봇핸드를 시뮬레이션하는 소프트웨어를 활용해 촉각이 항상 필요하다는 기조의 통념과 달리 “훈련에 대한 보상 순서‘가 중요하다는 점을 확인했다. 연구팀은 새로운 커리큘럼 기반 학습률 스케줄러를 도입해 수렴 속도를 향상시켰다. 그 결과, 학습 커리큘럼의 선택이 다양한 무게, 크기, 형태의 물체에 대한 능숙한 조작 학습의 진행에 큰 영향을 미친다는 것을 파악했다.
논문 교신 저자인 프란시스코 발레로-쿠에바스(rancisco Valero-Cuevas) 교수는 “보상이 시스템 개발을 이끌었다. 생물학적 시스템이 경험의 산물인 것처럼, 머신러닝과 생물학간 연결은, 물리적 세계에서 학습하고 적응할 수 있는 인공지능시스템의 발전을 가능하게 하는 강력한 연결고리이다"라고 말했다.
이번 연구는 로봇이 복잡한 조작 작업을 학습할 때, 학습 커리큘럼의 설계가 촉각 정보의 유무보다 더 중요한 요소라는 점을 시사한다. 이는 향후 로봇공학 및 인공지능 분야에서 학습 전략을 수립하는 데 있어 중요한 통찰을 제공한다고 연구팀은 밝혔다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'로봇부품·소프트웨어' 카테고리의 다른 글
| 中 유니트리, '한 손에 94개' 촉각 센서 탑재 로봇핸드 발표 (1) | 2025.04.03 |
|---|---|
| 테솔로, '하노버 메세'에 휴머노이드용 로봇핸드 (0) | 2025.04.02 |
| 10배 용량 ‘리튬 금속 음극’ 배터리 실용화 길 열었다 (0) | 2025.04.02 |
| 한국엡손, 고성능 통합 로봇 컨트롤러 'RC800-A' 출시 (0) | 2025.04.01 |
| 유엔디, 유럽 시장 확대 위해 '현지 로봇 기업과 협력 확대' (0) | 2025.04.01 |