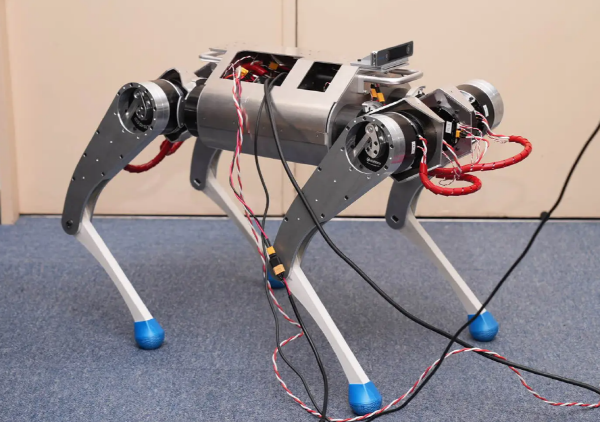
▲ 알티가 현재 개발중인 4족 보행 로봇
일본 로봇 전문기업 알티(RT)가 4족 보행 로봇 개발에 착수했다고 18일 밝혔다.
알티는 그동안 푸드테크용 휴머노이드 로봇 개발 등을 추진했다. 내년 중 고객사로부터 4족 보행 로봇 개발 의뢰를 받아 제품 개발을 완료하는대로 판매에 들어간다는 계획이다.
알티는 도쿄대 ‘가와하라주카켄토연구실(河原塚健人研究室)‘에서 개발하고 있는 ’메비우스(MEVIUS)’를 기반으로 교육 및 연구기관과 산업 분야에서 활용할 수 있는 4족 보행 로봇을 개발해 상품화할 계획이다. 머신러닝(기계학습) 기반 로봇 보행을 실용화한다.
알티는 그동안 인공지능 비전 기술, ROS(로봇운영체제) 개발 기술, 휴머노이드형 2족 보행 로봇 등의 개발 경험을 갖고 있으며 바퀴형 2족 보행 로봇 등 다양한 로봇을 위탁 개발해 국내외에 공급하고 있다. 이 같은 경험을 살려 산업계와 교육 현장에서 활용할 수 있으며 사회적 과제를 해결할 수 있는 로봇 솔루션을 개발해 공급하겠다는 계획이다.
알티가 현재 개발중인 4족 보행 로봇은 ▲고도의 균형 제어(다관절 구조와 고도의 센서를 채택함으로써 평지가 아닌 곳에서도 자연스러운 동작 구현할 수 있음) ▲ROS 2 지원(오픈소스 소프트웨어와 호환되고 연구 및 개발 환경에서 유연하게 활용 가능함) ▲머신러닝 기능 통합(인간이 원격 조작하거나 디지털 트윈으로 생성된 동작을 학습하는 기술을 탑재해 AI 학습 데이터의 효율적인 재현을 지원함) ▲모듈형 설계(맞춤형 설계로 교육용 교재부터 산업용 시제품까지 폭넓게 대응함) 등을 구현할 계획이다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 폴라리스쓰리디-호텔토랑, 배송 로봇 사업 협력 MOU 체결 (1) | 2024.12.19 |
|---|---|
| 베노티앤알, 알티캐스트 인수… 로봇 사업 경쟁력 강화 '포석' (1) | 2024.12.19 |
| 美 리얼보틱스, 맞춤형 휴머노이드로 AWS 투자 받아 (0) | 2024.12.18 |
| 中 자동차기업 BYD, 휴머노이드 로봇 개발한다 (0) | 2024.12.18 |
| 컴파스시스템, 두봇 팔레타이징 로봇 출시 (0) | 2024.12.18 |