
조규진 서울대 교수팀이 여러 물체를 함께 집어 이동 및 배치할 수 있는 ‘다물체 파지 그리퍼(MOGrip)’를 개발했다고 밝혔다. 이 그리퍼는 여러 물체를 동시에 이동시킬 수 있으며, 원하는 위치에 배치할 수 있고, 비정형 환경에서도 적용할 수 있다.
연구팀은 사람의 ‘다중 물체 파지 능력(multi-object grasping strategy)’에서 영감을 받아 이 그리퍼를 제안했으며, 이를 통해 픽앤 플레이스 동작의 효율성을 높일 수 있다고 밝혔다. 이번 연구 성과는 전문 학술지인 ‘사이언스 로보틱스’에 발표됐다.(논문 제목:MOGrip: Gripper for multiobject grasping in pick-and-place tasks using translational movements of fingers)
조규진 교수 연구팀은 지난달 29일 열린 '서울대 로보틱스 데이'에서 이 그리퍼를 시연했다.
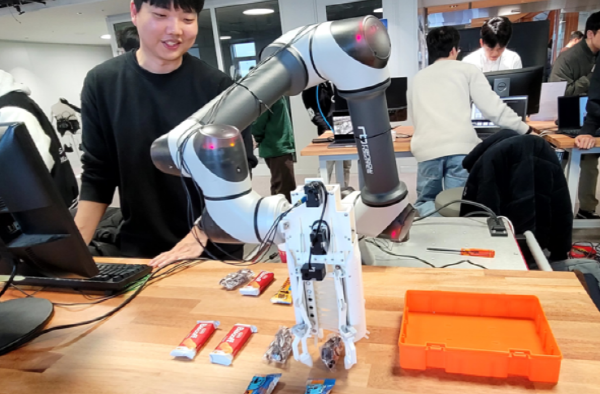
▲ 서울대 로보틱스 데이에서 그리퍼를 시연하고 있다.(사진=로봇신문)
연구팀에 따르면, 인간의 손은 손끝에서 손바닥으로 물체를 옮길 수 있는 능력을 가지고 있다. 물체를 손바닥으로 옮긴 후에는 손가락으로 또 다른 물체를 잡을 수 있다. 그러나 대부분 로봇 그리퍼는 하나의 물체나 여러 개의 물체를 동시에 잡을 수 있도록 설계됐다.
연구팀이 개발한 그리퍼는 4개의 손가락과 하나의 손바닥으로 구성돼 있으며, 각각 파지 부위(grasping section)와 저장 부위(storing section)로 기능한다. 손바닥은 탄성체의 털(hair)을 갖고 있으며, 컨베이어처럼 작동한다. 일련의 힘줄을 통해 손가락이 물체를 잡고 손바닥으로 운반해 보관할 수 있다. 이 때문에 손으로 여러 물체를 순차적으로 집어 들고 잡을 수 있다. 그런 다음 물체를 지정된 위치에 개별적으로 내려놓을 수 있다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'로봇부품·소프트웨어' 카테고리의 다른 글
| 美 T-로보틱스, 자연어 로봇 프로그래밍 기술로 78억원 유치 (1) | 2024.12.18 |
|---|---|
| 생추어리 AI, '손안 조작' 가능한 로봇 핸드 개발 (0) | 2024.12.16 |
| 유레카 로보틱스, 시리즈A 라운드에서 150억원 투자 유치 (0) | 2024.12.16 |
| ABB-ESS, 자동차 도장 공정 혁신한다 (0) | 2024.12.16 |
| 오토디스커버리, 휴머노이드용 로봇 핸드 내놓는다 (1) | 2024.12.13 |