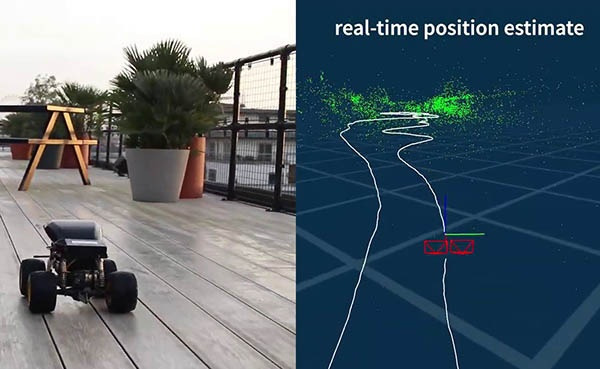
▲ 4족 보행 로봇이 미끄러운 산 지형을 통과하고 있다.(사진=탈린공대) 에스토니아 탈린공대(TalTech) 연구팀이 진흙탕, 습지, 젖은 눈길 등 도전적인 지형에서 로봇의 이동성을 크게 향상시킬 수 있는 생체모방형 로봇 발을 개발했다고 밝혔다. 사슴의 일종인 무스(말코손바닥사슴)의 발굽을 모방해 개발했다. 테크엑스플로어 보도에 따르면, 연구팀은 이번 연구 성과를 전문 학술지인 ‘바이오인스퍼레이션 & 바이오미메틱스’에 발표했다.(논문 제목:Robotic feet modeled after ungulates improve locomotion on soft wet grounds) 이번 연구 성과는 복잡한 자연 지형을 탐색하면서 민감한 환경 모니터링 활동을 수행하고, 농업을 지원하며, 재난 상황에 효과적으로 대..