
▲ 4족 보행 로봇이 미끄러운 산 지형을 통과하고 있다.(사진=탈린공대)
에스토니아 탈린공대(TalTech) 연구팀이 진흙탕, 습지, 젖은 눈길 등 도전적인 지형에서 로봇의 이동성을 크게 향상시킬 수 있는 생체모방형 로봇 발을 개발했다고 밝혔다. 사슴의 일종인 무스(말코손바닥사슴)의 발굽을 모방해 개발했다.
테크엑스플로어 보도에 따르면, 연구팀은 이번 연구 성과를 전문 학술지인 ‘바이오인스퍼레이션 & 바이오미메틱스’에 발표했다.(논문 제목:Robotic feet modeled after ungulates improve locomotion on soft wet grounds)
이번 연구 성과는 복잡한 자연 지형을 탐색하면서 민감한 환경 모니터링 활동을 수행하고, 농업을 지원하며, 재난 상황에 효과적으로 대응할 수 있도록 로봇의 기능을 확장하는 데 활용될 수 있다.
연구팀에 따르면, 로봇 다리를 활용한 이동성 기술은 에너지 효율성이 높아지고, 다재다능해지는 방향으로 발전해왔다. 로봇은 지형의 특성에 맞게 보행 방식을 조율해왔으나 일부 자연적인 지형은 아직 정복되지 않은 상태로 남아 있다.
마르하 크루스마(Marja Kruusmaa) 탈린공대 바이오로봇공학과 교수는 “진흙탕과 미끄러운 지형은 사람은 물론이고 로봇과 동물이 이동하기 어려운 지형 중 하나다. 이는 대부분의 로봇이 습지, 늪지대, 강 하구, 들판 등 자연에 많이 있는 육상 환경에 접근할 수 없다는 것을 의미한다"라고 말했다.
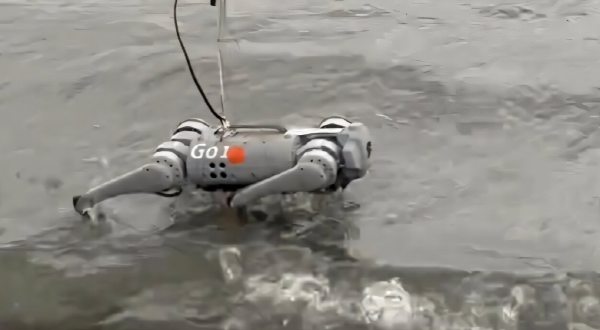
▲ 4족 보행 로봇이 흙탕물을 건너고 있다.(사진=탈린공대)
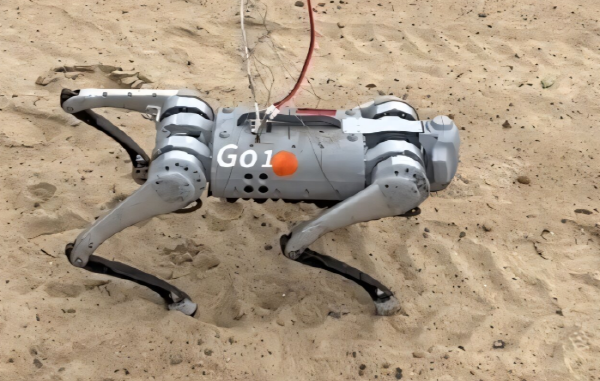
▲ 모래밭을 걷는 4족 보행 로봇
연구팀은 프랑스 베리에 있는 가축 농장에서의 관찰 활동과 기계공학 및 바이오로보틱스 지식을 결합해 특히 진흙탕 위를 걸을 때 장점을 발휘할 수 있는 첨단 로봇 발을 제안했다. 연구팀은 사슴의 일종인 ‘무스’의 발굽을 관찰하면서 물리적인 실험을 실시한 결과, 무스의 갈라진 발굽이 팽창과 수축을 반복하면서 진흙탕에서 걷는 데 유리하다는 점을 발견했다. 특히 무스의 발굽이 마치 흡입컵처럼 작용한다는 점을 깨달았다.
연구팀은 무스의 발굽을 모방해 실리콘으로 생채모방형 로봇 발을 설계했다. 진흙탕에서 테스트한 결과, 로봇 발을 간단히 수정하면 로봇의 가라앉음과 흡입력이 절반으로 감소하는 데 반해 로봇의 에너지 소비는 최대 70%까지 감소하는 것으로 나타났다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'로봇부품·소프트웨어' 카테고리의 다른 글
| 中 라이다 전문 기업 로보센스, 2세대 로봇 핸드 공개 (0) | 2025.01.08 |
|---|---|
| KAIST, 하드디스크 필요 없는 ‘차세대 메모리’ 개발 (0) | 2025.01.06 |
| 英 슬램코어, 2024 톱 테크 스타트업 어워드 수상 (0) | 2025.01.06 |
| 테솔로, 'CES 2025'서 다관절 로봇 핸드 라인업 공개 (0) | 2025.01.06 |
| 시에라베이스, 지능형 로봇 시설물 진단솔루션으로 CES 2025 ‘최고혁신상’ 수상 (0) | 2025.01.06 |