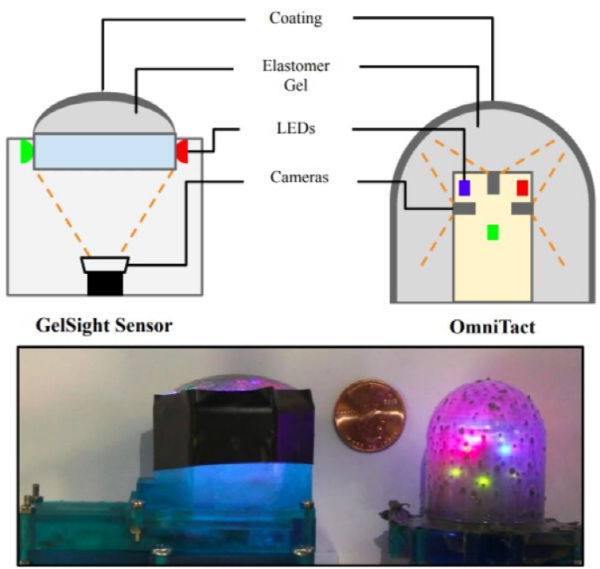
UC 버클리 연구진이 사람의 손가락처럼 여러 지점에서 촉각을 인지할 수 있는 ‘다지점(multi-directional)’ 촉각 센서를 개발했다고 테크엑스플로어 등 매체들이 보도했다. UC 버클리 ‘프레데릭 에버트(Frederik Ebert)’ 등 로봇 과학자들은 MIT와 UC버클리가 공동 개발한 ‘겔사이트(GelSight)’ 촉각 센서 기술을 기반으로 여러 지점에서 촉각 기능을 제공할 수 있는 다지점 촉각 센서인 ‘옴니택트(OmniTact)’를 개발했다. 연구팀은 이번 연구 성과를 과학 논문 발행전 공개 사이트인 ‘아카이브(arXiv)’에 공개했다. 겔사이트 센서는 대상 물체에 관한 고해상도 이미지를 제공하지만 한면에서만 촉각을 인지할 수 있다. 센서의 크기가 크고 평평하다는 특징을 갖고 있다. 또 다른 촉각 센서인 ‘옵토포스(OptoForce)’ 센서는 커브 형태를 취하고 있지만 촉각 지점이 한 곳에 불과하다. 이들 센서와 달리 옴니택트는 사람의 손가락 끝처럼 둥근 모양을 하고 있으며 물체의 크기나 형태를 느낄 수 있는 촉각 지점이 여러 곳에 위치하고 있다.
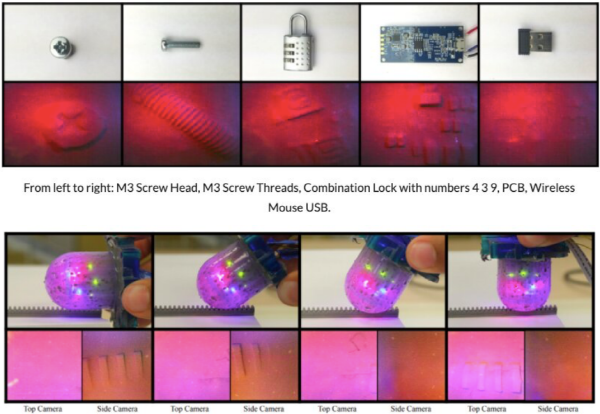
옴니택트는 모든 면에서 촉각을 인지할 수 있으며 고해상도 이미지를 제공한다. 로봇 그리퍼나 로봇 핸드에 결합하면 민감한 인공 손가락으로 기능한다. 로봇은 옴니택트를 통해 다양한 사물의 형태와 크기를 추정할 수 있다.
옴니택트는 실리콘 겔로 만들어진 인공 피부를 갖고 있으며 내부에 복수의 마이크로 카메라를 내장하고 있다. 마이크로 카메라는 병원용 내시경에 전형적으로 사용된다. 카메라는 실리콘 겔로 이뤄진 인공 피부의 왜곡을 인식할 수 있으며 컴퓨터 비전시스템과 이미지 처리 기술을 이용해 물체에 관한 정보를 추론한다. 연구팀은 고해상도 피드백의 활용과 수동 측정 절차를 피하기 위해 학습 기반의 접근 방법을 활용했다고 설명했다. 연구팀은 앞으로 옴니택트 센싱 기술이 원격 로봇 수술, 우주 탐험 로봇, 수중 로봇 등에 활용될 수 있을 것으로 기대하고 있다. | |||||||||||||||||
| <저작권자 © 로봇신문사 무단전재 및 재배포금지> | |||||||||||||||||

'로봇부품·소프트웨어' 카테고리의 다른 글
| 독일 라이더 업체 '블릭펠트', 시리즈 A펀딩 성공 (0) | 2020.04.01 |
|---|---|
| 페치 로보틱스, 개발자 툴킷 '워크플로우 빌더' 발표 (0) | 2020.04.01 |
| 알에스오토메이션, 야스카와에 신제품 드라이브 ‘GA700’ 공급 (0) | 2020.03.25 |
| 본시스템즈, 보급형 정밀 감속기 '경박단소' 개발 (0) | 2020.03.24 |
| 로봇도 인간 손처럼 느낀다···스위스연방공대, 촉각센서 개발 (0) | 2020.03.20 |