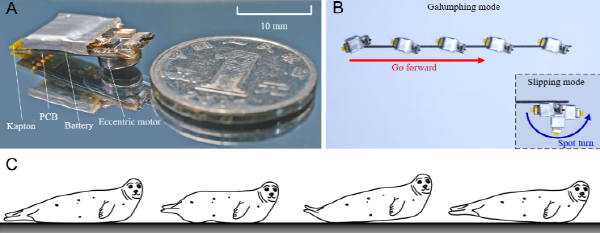
중국 하얼빈공업대(哈尔滨工业大) 기계전자공학ㆍ자동화부 리빙(李兵), 리야오(李曜) 교수팀이 물개의 이동 동작과 속도에서 영감을 얻어 무게가 1.2g에 불과한 마이크로 크롤링 로봇을 개발했다.
연구 성과는 국제 학술지인 어드밴스드 사이언스(Advanced Science)에 게재됐다.
리빙 교수는 "물개의 이동 속도와 점프 방식에서 영감을 받았다"며, 이 방식을 통해 단일 모터로 구동되는 견고한 로봇이 직선 이동, 곡선 이동 및 조향과 같은 유연한 동작을 구현할 수 있다고 설명했다.
리야오 교수는 이 마이크로 로봇에 '편심력 구동 다방향 모션 전달' 기술을 적용했다고 설명했다. 이 기술을 기반으로, 로봇은 단 4개의 부품 만으로 민첩하게 기어오르는 복잡한 운동을 할 수 있다는 설명이다.
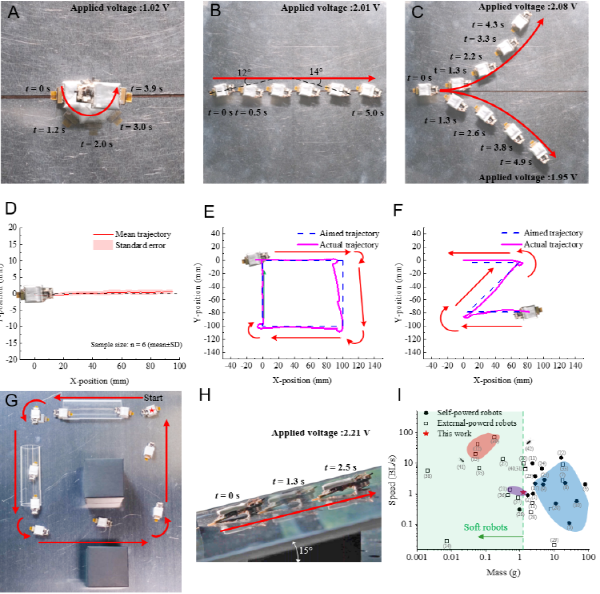
연구팀은 미시적 운동의 주기적 특성 변화가 로봇의 거시적 운동 궤적에 직접 영향을 미친다는 점을 발견했다. 구동 전압을 변경하고, 모터에서 발생하는 편심 속도를 조정하는 방식으로 로봇의 거시적 궤적을 제어할 수 있도록 했다.
마이크로 크롤링 로봇은 작은 크기와 가벼운 무게 덕분에 파이프라인 검사 및 모니터링, 복잡한 장비의 내부 유지 관리 등에서 중요한 역할을 수행할 수 있다. 공공 안전 검사와 위험물 제거 작업에서도 강점을 갖고 있다. 의료 분야 적용시에는 로봇 전달 기술을 통해 최소 침습 도구 활용을 확대할 수 있을 것으로 보인다.(제휴=중국로봇망)
Erika Yoo robot3@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 佛 엑소텍, 美 퍼스트 서플라이 창고에 스카이팟 시스템 (1) | 2024.06.03 |
|---|---|
| 일본 오사카 '엑스포 2025'에서 'AI여행가방' 실증 실험한다 (0) | 2024.06.03 |
| 中 칭다오서 건축 로봇 첫 적용..."5일이면 건물 한 층 지어" (1) | 2024.06.03 |
| 中 상하이교통대, 시각 장애인용 6족 안내 로봇 개발 (0) | 2024.06.03 |
| 두산로지스틱스솔루션, 中 리비아오 로보틱스와 MOU 체결 (0) | 2024.05.31 |