젊은 로봇 공학자(Young Robot Engineer)' 코너는 한국로봇학회와 로봇신문이 공동으로 기획한 시리즈물로 미래 한국 로봇산업을 이끌어 갈 젊은 로봇 공학자를 발굴해 소개하는데 있다.
69번째 인터뷰는 연세대학교 기계공학부 현재상 교수다. 현 교수는 1988년생으로 연세대에서 기계공학으로 학사, 2020년 미국 퍼듀대에서 기계공학으로 박사학위를 받았다. 졸업 후 2020년 3월부터 3D 비전 시스템 전문 기업 Orbbec 3D에서 2022년 4월까지 리서치 사이언티스트로 재직하다 2022년 9월부터 연세대학교 기계공학부 조교수로 근무하고 있다.
2019년 KSEA/KOSEN(재미한인과학기술자협회/한인과학기술네트워크) 최우수 포스터상, 2020 전자 이미징 최우수 논문상, 2022 KSMTE(한국생산제조학회) 젊은 엔지니어상, 2023 ICROS(제어로봇시스템학회) 우수 젊은 연구상, 2023 KSPE(한국정밀공학회) 젊은 엔지니어상을 수상했다.
주요 관심 분야는 3D 광학센싱, 3D 이미징, 구조광을 이용한 3D 재구성, 깊이 센서(Depth Sensor)
개발, 머신비전, 증강현실/가상현실, 센서융합, 자율주행차에 대한 3D 인지 등이다.
Q. 연세대 기계공학부 DAMIS Lab(high-Dimensional Accurate Measurement and Intelligent Sensing LABoratory)에 대해 간략한 소개 부탁드립니다.
주로 광학을 이용한 3차원 이미지 복원에 대한 연구를 진행하고 있습니다. 그 중에서도 카메라를 활용하여 피사체의 3차원 정보를 정교하고 빠른 속도로 획득하는 방법에 대한 연구를 하고 있습니다. 구조광이라 불리는 특수한 패턴을 사용하여 3차원 이미지를 복원하기 때문에 정확도가 다른 기술에 비해 높은 편입니다. 이러한 장점 때문에 로봇 비전, 증강 현실을 위한 3차원 이미지, 게임 등에 다양하게 활용되고 있습니다.

▲2024 한국로봇종학학술대회에 참가한 DAMIS LAB 멤버들
Q. 최근 하고 계신 연구가 있다면 소개 부탁드립니다.
최근 연구 중인 주제로는 구조광 기반의 실리콘 촉각 센서 개발, 실감형 증강현실 구현을 위한 아이 트랙킹(Eye tracking) 기술 개발, 실내 정밀 지도 생성을 위한 3차원 기계식 프로젝터 개발, 이벤트 카메라를 활용한 법선 벡터 추정 알고리즘 개발 등이 있습니다. 3차원 카메라 시스템 개발부터 3차원 데이터 압축 알고리즘 개발까지 3차원 이미지 복원과 가상현실 및 증강 현실 구현에 필요한 기술에 대한 전반적인 연구를 진행 중입니다.
▲DAMIS LAB에서 진행 중인 연구 주제들을 나타낸 마인드 맵
Q. 2020년 미국 퍼듀대 기계공학과에서 “High-Accuracy, High-Speed 3D Optical Sensing in Unstructured Environments”로 박사 학위를 받으셨는데 어떤 내용인지 소개 부탁드립니다.
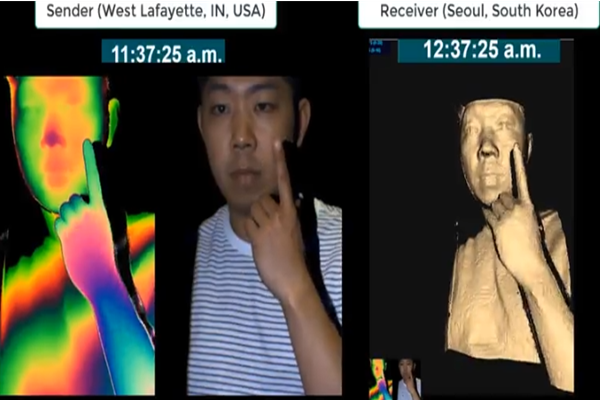
빛이나 먼지 등과 같은 외부 요인에 따른 간섭이 심한 환경에서 빠른 속도로 정밀한 3차원 정보를 획득할 수 있는 장비와 알고리즘 기술에 대해 개발하였습니다.
▲2020년 박사 최종 디펜스 당시 사진
기존 3차원 이미징 장비에 비해 훨씬 다양한 파장 영역대의 광원을 사용할 수 있도록 기계식 프로젝터를 개발하였으며 초당 1만장의 3D 이미지 얻을 수 있도록 함으로써 정확한 고속 3차원 정밀 측정을 가능하도록 하였습니다. 또한 세부 패턴 알고리즘을 개발함으로써 측정 정확도와 속도를 향상시켰습니다.
▲초고속 정확한 3차원 이미징을 위한 기계식 프로젝터 메커니즘
Q. 교수님의 주요 관심 분야가 3D optical sensing, 3D imaging, 3D reconstruction with structured light, depth sensor development, machine vision, augmented reality / virtual reality, sensor fusion, 3D perception for autonomous vehicle 등으로 알고 있습니다. 3D 옵티컬 센싱이나 관련 분야의 최신 동향이나 기술적인 트렌드가 있다면 무엇인지 궁금합니다.
다양한 분야에서 3차원 이미지 측정에 대한 관심이 높아지고 있습니다. 최근 적층 제조의 관심이 커짐에 따라 적층 로봇과 함께 사용하기 위한 3차원 이미지 시스템 개발에 대한 수요도 꾸준히 증가하고 있습니다.
적층 제조의 경우 초기 오차를 측정하지 못해 피드백 제어하지 못하면 계속 오차가 누적되는 문제가 발생하는 데, 이를 카메라를 기반으로 하여 층(layer)별로 정밀 고속 촬영하여 노즐의 피드 속도를 제어하는 연구도 각광을 받고 있습니다.
또한 가상현실 및 증강현실에 대한 관심이 늘어남에 따라서 주변환경을 정밀한 3차원 지도를 생성하여 몰입감 있는 경험을 사용자에게 전달하고자 하는 알고리즘 개발이 활발히 이루어지고 있습니다. 그리 정밀한 3차원 정보를 다른 곳에 전달하기 용이한 형태로 압축하는 알고리즘 개발에 대한 연구도 활발히 이루어지고 있습니다.
▲가상현실 및 증강현실에 활용하기 위한 3차원 압축 알고리즘 개발
Q. 박사 학위 취득 후 2020년 2월부터 2022년 4월까지 ORBBEC 3D에서 연구과학자로 계셨는데 당시 어떤 연구를 하셨는지 궁금합니다.
초정밀 3차원 카메라 시스템 개발팀의 책임자로 하드웨어 설계부터 GUI 개발까지 전반적인 연구를 담당하였습니다. 주로 적용 분야는 범죄 현장에서 과학 수사를 위한 3차원 이미지 시스템을 개발하였습니다. 알래스카와 같이 눈이 많이 내리는 지역에서 범죄가 발생하면 증거를 수집하기 위해 아직도 석고를 주로 활용합니다. 이는 범죄 현장을 훼손시킬 우려가 크기 때문에, 비 접촉식 방법으로 아주 높은 해상도로 눈 속의 족적이나 자동차 타이어 흔적을 3차원으로 복원하는 시스템을 개발하였습니다.
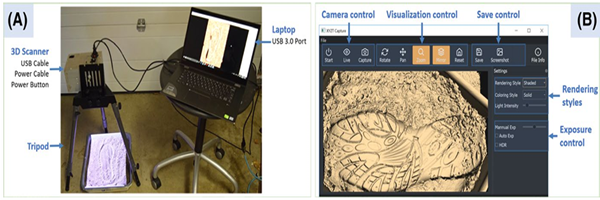
▲범죄 현장의 과학수사를 위한 비접촉식 고해상도 3차원 이미징 시스템
Q. 로봇을 연구하면서 가장 어려운 점은 무엇입니까?
항상 기존에 없던 새로운 것을 생각해야 하고 문제 해결에 끊임없이 물고 늘어져야 하기 때문에, 연구할 당시에는 앞이 보이지 않는 것처럼 막막함을 느낄 때가 많습니다. 원하는 방향대로 흘러가는 경우보다 그렇지 않는 경우도 많기 때문에 인내를 가지고 문제에 대해 접근해야 할 때가 많습니다.
Q. 로봇을 연구하시게 된 동기가 있다면?
로봇의 눈을 달아 준다는 점이 굉장히 매력이 있게 느껴졌습니다. 사람을 이롭게 하는 로봇을 개발하기 위해서는 사람만큼 혹은 그 이상으로 데이터를 처리할 수 있어야 한다고 생각했습니다. 그 중에서도 가장 많은 내용을 담고 있는 3차원 정보를 인간에게 혹은 로봇에게 정확하고 빠르게 전달하는 연구를 하고 싶다고 항상 생각했습니다.
Q. 연구자로서 앞으로의 꿈과 목표가 있다면?
사람이 중심이 되는 연구를 계속 꾸준히 하고 싶습니다.
Q. 로봇공학자가 되려는 후배들에게 어떤 준비와 노력이 필요한지 조언해 주신다면?
로봇 공학은 여러 가지 학문이 결합된 융합 학문입니다. 그 중에서 어떤 분야에 본인이 흥미가 있는지 깊게 고민하시고 열정을 키워 나가면 좋겠습니다. 모든 학문이 그렇듯 기초가 중요하기 때문에 본인이 기여하고 싶은 로봇 공학의 기초 학문을 열심히 공부하는 것도 중요하다고 생각합니다.
Q. 연구에 주로 영향을 받은 교수님이나 연구자가 있다면...
제 지도 교수 님이신 퍼듀대학의 Song Zhang(송 장) 교수님의 영향을 가장 많이 받았습니다. 단순히 알고리즘을 개발하는 것뿐만 아니라 실용성에 대해 강조를 많이 하셨습니다. 공학 분야가 그렇듯 사람들의 생활에 도움이 되는 방향으로 연구가 이뤄져야 한다고 강조를 많이 하셨고, 냉철하고 정확하게 직면 문제를 판단하고 해결하려 하셨습니다. 이 점을 많이 본받으려 계속 노력 중입니다.

▲2023년 SPIE 학술대회에서 만난 Song Zhang 교수님(사진 오른쪽에서 다섯번째)과 제자들
조규남 전문기자 ceo@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'인물연구' 카테고리의 다른 글
| 김진오 한국로봇산업협회 회장 취임 인터뷰 (0) | 2024.05.27 |
|---|---|
| '젊은 로봇 공학자' (70) 한양대 이영문 교수 (0) | 2024.05.22 |
| '젊은 로봇 공학자' (68) ETRI 윤영우 책임연구원 (0) | 2024.04.15 |
| 최재원 제어로봇시스템학회장 (1) | 2023.11.20 |
| '젊은 로봇 공학자' (67) 부산대 이인호 교수 (0) | 2023.10.17 |