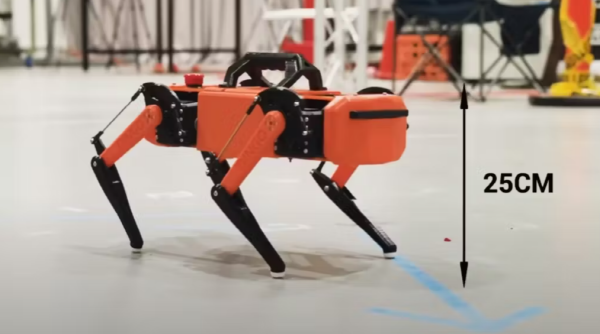
▲오픈소스 4족 보행로봇 '딩고'(사진=핵스터)
호주 모나시대학(Monash University) 학부생들이 저가의 오픈소스 4족 보행 로봇 ‘딩고(Dingo)’를 개발했다.
이 대학에서 로봇 및 메카트로닉스 엔지니어링을 전공하고 있는 알렉산더 칼버트와 나단 퍼거슨은 현재 보급되고 있는 4족 보행 로봇이 너무 비싸 교육용으로 활용하기 힘들다고 보고 저렴하게 제작할수 있는 4족 보행 로봇 딩고를 개발했다. 딩고를 제작하는 데 들어간 비용은 1500달러(약 197만원) 정도다. 관련 소스는 깃허브(GitHub)를 통해 공개됐다.
헥스터(hackster.io)에 따르면 딩고는 무게 3kg이며 높이 25cm, 길이와 너비는 38*25cm다. 플레이스테이션 컨트롤러나 컴퓨터 키보드로 제어할 수 있으며 고급 제어 알고리즘을 실행하기 위해 라즈베리파이 싱글보드를 탑재하고 있다. 아날로그 센서와 같은 추가적인 주변기기를 처리하기 위해 아두이노 나노(Arduino Nano)를 포함하고 있으며, 리튬폴리머 배터리 탑재시 약 25분 동안 연속적으로 로봇을 작동할 수 있다.
로봇의 최고 속도는 초당 30cm이며, 전방향으로 움직인다. 최대 500g의 하중을 운반할 수 있기 때문에 센서, 액추에이터 등을 추가 탑재할 수 있다. 4개의 다리는 각각 3개의 서보 모터에 의해 구동되며, 각각 35kg-cm의 토크를 생성할 수 있다.
로봇 본체는 뒷면에 USB 및 이더넷 포트가 포함된 맞춤형 케이스에 들어 있으며, 배터리 상태 표시 등 용도로 사용할 수 있는 소형 LCD 디스플레이를 갖췄다. 딩고 상단에는 실험 중 문제가 발생할 경우 전원을 즉시 차단할 수 있는 버튼이 있다.
이 로봇은 보스턴 다이내믹스의 스팟 등 고가 4족 보행 로봇 제품과, 일반 취미용 4족 보행 로봇의 중간 지대를 집중 공략하기 위해 제작됐다. 특히 로봇에 본격적으로 입문하는 학생들을 위한 대안이 될 수 있을 것으로 기대된다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 佛 AI 로봇 ‘미로카이’, 파리 비바테크서 호평 (0) | 2023.06.26 |
|---|---|
| RP-일본 오웰, ‘알봇’ 사업화 MOU 체결...일본 시장 공급 (0) | 2023.06.26 |
| 美 메릴랜드대, 옷에 부착하는 소형 웨어러블 로봇 개발 (0) | 2023.06.23 |
| 독일 막스플랑크 지능연구소, 천산갑 닮은 유연한 로봇 개발 (0) | 2023.06.22 |
| 로보트닉 오토메이션, 보안용 모바일 로봇 런칭 (0) | 2023.06.22 |