미 조지아대 공대(University of Georgia College of Engineering) 연구팀이 나선형으로 움직이는 소프트 그리퍼를 개발했다고 밝혔다.
조지아대 공대 '메이블 폭(Mable Fok)' 교수팀은 “콩 줄기가 긴막대를 감아올라가는 모습에서 아이디어를 얻어 아주 작은 직경의 물체도 부드럽게 감아올려 잡을 수 있는 나선형 소프트 그리퍼를 개발하게 됐다”며 개발 배경을 설명했다. 폭 교수는 “우리는 소프트 그리퍼 개발을 위해 다양한 설계 방법을 시도했지만 만족스런 결과를 얻지 못했다. 이때 몇년전 집에서 키우던 긴 막대를 타고 올라가는 콩 줄기를 생각하게 됐다”고 말했다. 콩은 터치에 민감한 줄기들을 이용해 긴 막대나 로프를 감아가면서 올라간다.
연구팀은 연구 성과를 전문 저널인 ‘옵틱스 익스프레스’에 발표했다. 나선형 소프트 그리퍼는 단일의 공기압 제어방식을 채택했다. 복수의 공기압 제어 방식을 채택할 경우 복잡한 조정 과정이 필요하다는 게 연구팀의 설명이다. 이 그리퍼는 감아 오르는 동작을 독창적인 방식으로 실행할 수 있기 때문에 비좁은 공간에서도 운용할 수 있다는 특징을 지녔다.
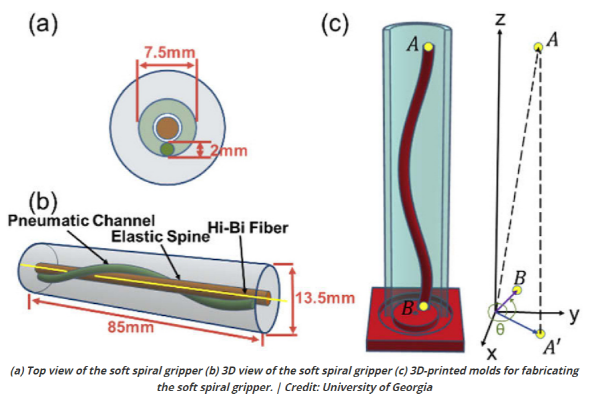
연구팀은 나선형 소프트 그리퍼를 제작하기 위해 탄력성을 갖춘 로봇의 뼈대 중앙 부분에 광섬유 센서를 탑재했다. 이 센서는 그리퍼의 비틀림 각도, 목표물의 물리적인 패러미터, 목표물을 느슨하게 해주는 외부의 교란 요인을 센싱할 수 있다. 소프트 그리퍼의 길이는 3인치 이상이며 실리콘으로 만들어졌다.
연구진은 이 그리퍼를 이용해 연구실에서 연필이나 붓 등 다양한 물체를 피킹하는 시험을 성공적으로 완료했다. 식물이나 꽃과 같은 물체도 망가트리지 않고 잡을 수 있다. 수술용 로봇, 실험실내 유리관 작업 등 다양한 용도에 적용할 수 있다는 설명이다.
연구팀은 앞으로 광섬유 센서의 판독에 기반한 자동 피드백 제어기술과 바이오 의료용 로봇을 위한 그리퍼의 소형화 등 연구를 지속한다는 계획이다.
|
||||||||||||
| <저작권자 © 로봇신문사 무단전재 및 재배포금지> | ||||||||||||

'전문서비스로봇' 카테고리의 다른 글
| 인도 로봇 활용, 코로나 환자 케어에서 산업·군용까지 (0) | 2020.12.22 |
|---|---|
| 미군, 근육조직 접목한 '바이오 하이브리드' 로봇 개발한다 (0) | 2020.12.22 |
| 4족 보행 로봇 스팟, 지구밖 화성 탐사 나선다 (0) | 2020.12.21 |
| 제넥스, UV살균로봇 '라이트 스트라이크6' 발표 (0) | 2020.12.21 |
| 중국 '아이플라이텍', 외골격 로봇 기업에 신규 투자 (0) | 2020.12.21 |