협동 로봇, 서비스 로봇 등 사람과 근접한 환경에서 활동하는 로봇의 보급이 증가하면서 보다 부드럽고 사람을 로봇으로부터 안전하게 보호해주는 센서 기술의 중요성이 높아지고 있다. 사람이 로봇에 접근하면 로봇 센서가 바로 사람을 인지해 동작을 중단하거나 동작 속도를 늦추는 게 핵심이다. 이 같은 기능을 수행하기 위해 빛이나 소리에 의존하는 적외선 또는 초음파 ToF(time-of-flight) 센서 기술들이 속속 개발되고 있다. 이들 센서들은 반사되는 신호를 측정해 사물이나 사람을 인지할 수 있지만 접근하는 물체와 긴밀하게 조정하는 작업이 필요하기 때문에 신호를 인지하는 데 제한 요인이 될 수 있다. ‘IEEE 스펙트럼’에 따르면 로봇 스타트업인 ‘에이딘 로보틱스(Aidin Robotics·대표 최혁렬,이윤행)’는 이 같은 문제점을 우회하기 위해 임피던스의 변화를 측정할 수 있는 새로운 형태의 근접 센서를 개발했다. 이 근접 센서를 개발한 에이딘 로보틱스는 성균관대 기계공학부내 로보틱스 이노베토리(Robotics Innovatory) 실험실에서 스핀오프했으며 ‘사람-산업ㆍ협동로봇’ 간에 발생하는 사고를 예방하고 작업성을 더욱 높이기 위해 지난 1995년부터 축적한 필드 센싱(Field Sensing) 기술을 활용해 새로운 센서기술들을 연구하고 있다.
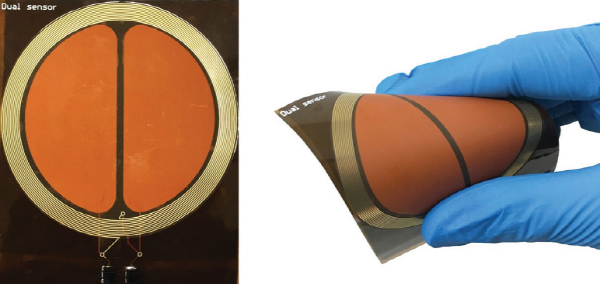
이번에 개발한 근접 센서는 피부처럼 얇고 유연한 특성을 갖고 있기 때문에 산업용 로봇, 협동 로봇,서비스 로봇 등 다양한 로봇에 쉽게 장착해 활용할 수 있다. 넓은 각도에서 전자기장을 유도한다. 사람이나 물체가 센서에 접근하면 전자기장내 저항 값의 변화를 측정해 관련 데이터를 로봇에게 알려준다. 이를 통해 로봇은 접근 하는 사람 또는 물체의 거리와 접근 각도를 인지할 수 있다. 연구진은 이번에 개발한 근접 센서에 관한 연구 성과를 2월 26일자 ‘IEEE Transactions on Industrial Electronics’에 게재했다. 근접 센서는 유연하고 코일과 같은 디자인을 하고 있는 전극으로 만들어졌다. 이윤형 대표는 ‘IEEE 스펙트럼’에 “센서가 매우 유연하기 때문에 로봇의 기하학적인 구조에 맞춰 얼마든지 형태를 바꿀 수 있다”며 “접근하는 물체가 사람인지, 금속인지 아니면 플라스틱인지를 구별할 수 있다”고 했다. 센서는 30m 이내에서 접근하는 사람의 동작을 확인할 수 있다. 평면에 센서를 설치하면 90%의 정확도로 인식할 수 있으며 곡면에 설치하면 전자기장이 약해져 정확도가 떨어진다. 또 설치되어 있는 표면이 점점 곡면으로 바뀌면 센서의 정확도도 따라서 떨어진다. 가장 최근 버전의 통합 센서 모듈을 갖고 연구팀이 실험한 결과 곡면에 설치되면 20m 이내의 물체를 94%의 정확도로 인식할 수 있었다. 회사 측에 따르면 이 센서는 현재 유니버설 로봇의 협동 로봇인 'UR 10'과 뉴로메카의 협동 로봇인 '인디7' 기종에 채택이 가능하며 앞으로 대량 생산을 통해 서비스 로봇에도 확대 적용할 계획이다. | |||||||||||
| <저작권자 © 로봇신문사 무단전재 및 재배포금지> | |||||||||||

'로봇부품·소프트웨어' 카테고리의 다른 글
| 中 로봇 부품업체 'CRP', 173억 원 규모 시리즈B 투자 받아 (0) | 2020.03.11 |
|---|---|
| 미 NS, 화물열차 운행중 선로점검 가능···자율검사 시스템 실용화 (0) | 2020.03.11 |
| 실크, 초소형 ‘통합 4D+ 라이다’ 개발력 인정···143억 펀딩 (0) | 2020.03.10 |
| 소프트뱅크,페퍼 코딩용 SW '테티스' 출시 (0) | 2020.03.10 |
| 비보텍, AI 얼굴인식 솔루션 탑재한 IP 카메라 출시 (0) | 2020.03.02 |