현재 자율주행 자동차의 핵심 센서로 사용되는 라이더나 카메라는 비나 눈이 올 때 제대로 기능을 하지 못한다. 카메라는 차선이나 교통 표지판을 잘 인식하지 못하고 라이더는 오작동이 일어난다. 자율주행자동차가 궂은 날씨에도 목적지까지 자율 주행하기 위해선 센서의 기능을 보완하는게 필요하다. MIT 컴퓨터·인공지능연구소(CSAIL) 연구진이 도로나 땅밑의 지형 지물을 파악할 수 있는 ‘지표 투과 레이더(GPR:Ground Penetrating Radar)‘ 기술을 이용해 자율주행자동차의 위치 확인 및 내비게이션을 지원할 수 있는 기술을 개발했다고 ’더 로봇 리포트‘가 보도했다. 연구팀은 연구 성과를 이달말 전문 저널인 ‘IEEE 로보틱스 앤 오토메이션 레터스’에 발표하고, 오는 5월 프랑스에서 열리는 ‘ICRA’에서도 소개할 예정이다. MIT CSAIL은 원래 MIT 링컨연구소가 개발한 지하 투과 레이더 기술을 기반으로 ’LGPR(localizing ground-penetrating radar)‘을 개발해 자율주행자동차에 적용했다. 미국 스타트업인 ‘웨이브센스(WaveSense)’도 MIT 링컨연구소의 ‘지표 투과 레이더‘ 기술을 활용해 보다 안전한 자율 내비게이션 기능을 제공하는 센서 기술을 개발하고 있다.
MIT 연구진은 지하에 있는 토양 상태, 바위, 나무 뿌리 등을 파악하기 위해 자율주행 자동차에서 지표 투과 레이더를 설치해 전자기 펄스 신호를 송수신할 수 있도록 했다. 자율주행자동차는 매핑 과정에서 지하공간 특유의 ‘지문(fingerprint)’을 생성하며, 자동차가 다시 그 자리에 올 때 자신의 위치를 확인할 수 있다. 이번 연구에 참여한 ‘테디 오트(Teddy Ort)’ 박사 과정은 “LGPR이 지하공간의 특정 요소를 수치화해 이미 생성된 지도와 비교한다”며 “카메라나 라이더의 도움없이도 정확하게 차량의 위치를 확인할수 있다”고 말했다.
연구팀이 비와 눈이 올 때 지하 투과 레이더의 성능을 비교한 결과 우천시 오차가 큰 것으로 나타났다. 눈이 올 때, 맑은 날씨와 비교한 결과 평균적으로 1인치 정도의 오차가 생겼지만 우천시에는 평균 5.5인치의 오차가 났다는 것. 이는 빗물이 지하에 스며들면서 실제 지하 토양 상태와 LGPR 데이터간에 불일치 현상이 심해졌기 때문으로 해석된다. '다니엘 러스(Daniel Rus)' 교수는 연구팀은 6개월 동안 LGPR을 테스트한 결과 “LGPR이 악천후에 자율주행자동차에 실절적인 잇점을 제공, LGPR의 효용성이 입증됐다"고 지적했다. 다만 연구팀은 폐쇄된 도로 환경에서 저속으로 자율주행차를 운행했다는 한계가 있다며 앞으로 고속도로 등에도 추가적으로 테스트를 해봐야한다고 덧붙였다.
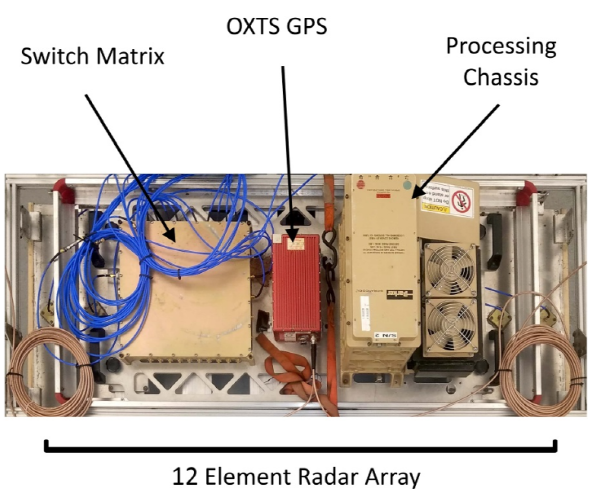
현재 자동차 뒷부분에 끌고 다니고 있는 지하 투과 레이더 장비의 소형화도 향후 해결해야할 과제다. 연구팀이 개발한 레이더 장치는 너비가 6피트 정도에 달하고 투박해 소형 경량화 필요성이 제기됐다. | |||||||||||||||||||||||
| <저작권자 © 로봇신문사 무단전재 및 재배포금지> | |||||||||||||||||||||||



'로봇부품·소프트웨어' 카테고리의 다른 글
| 벨로다인, ‘MODEX 2020’서 라이더 솔루션 전시 (0) | 2020.03.02 |
|---|---|
| 맥심, 고속 자율주행 차량용 초소형 라이더 IC 3종 출시 (0) | 2020.02.27 |
| 현대글로비스,'로봇업무자동화(RPA)' 시스템 도입 (0) | 2020.02.26 |
| '피크닉', 로봇 팔 오픈소스 SW '무브잇 2' 발표 (0) | 2020.02.24 |
| 美 셉톤테크놀로지스, '거울없는' 라이더 개발비 600억 투자받아 (0) | 2020.02.20 |