
스위스 로잔연방공과대(EPFL) 연구팀이 비행 중 수직 나무 기둥에 충돌해 착륙할 수 있는 비행 로봇 기술을 개발했다고 밝혔다.
이번 연구 성과는 전문 학술지인 ‘네이처 커뮤니케이션스 엔지니어링’에 게재됐다.(논문 제목:Crash-perching on vertical poles with a hugging-wing robot)
연구팀은 수직 나무 기둥에 찰싹 달라붙는 동물이나 박쥐 등 조류에서 영감을 받아, 날개 달린 무인항공기(UAV· Unmanned Aerial Vehicles)가 비행 중에 수직으로 뻗은 나무 기둥에 충돌해 기둥을 껴안는 방식으로 착륙할 수 있는 기술을 개발했다고 밝혔다.
연구팀은 이 기술 개발을 위해 공중을 활공하고, 비행 중 기둥에 충돌해 나무 기둥을 움켜쥘 수 있는 이중 목적의 날개를 설계했다. 연구팀이 설계한 ‘퍼치허그(PercHug)’ 플랫폼은 UAV의 앞부분(nose)이 위로 향하는 방식으로 설계해 로봇이 나무 기둥과 충돌시 수평 비행에서 수직으로 방향을 바꾸고, 이후 날개로 껴안도록 했다. 이 로봇은 15° 이상의 충격 각도에서 강력하게 방향을 바꾸며 직경이 로봇 날개 폭의 28%보다 큰 나무 기둥에 착륙할 수 있다.
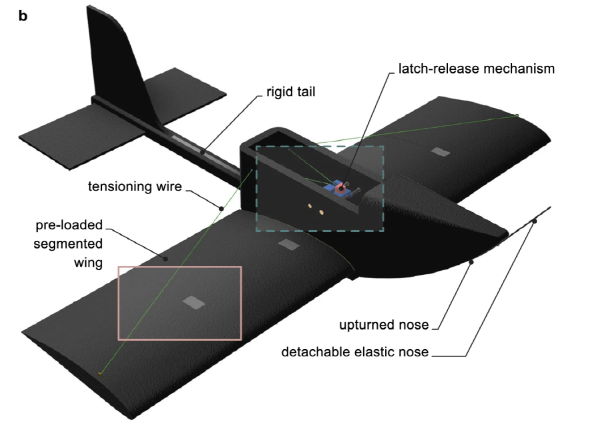
▲ UAV의 주요 구성

▲ UAV의 충돌 착륙시 성능 분석
연구팀이 실험한 결과, 78%의 성공률로 나무 기둥에 충동 착륙이 가능한 것으로 나타났다. 연구팀은 이 기술이 향후 검사, 유지보수, 생물 다양성 보전 등 여러 분야에 활용될 수 있을 것으로 기대하고 있다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'드론' 카테고리의 다른 글
| 노키아, 자율드론 이용한 창고 재고모니터링 서비스 (0) | 2024.08.12 |
|---|---|
| '세계모기프로그램', 드론으로 질병에 걸린 모기 대량 방출 기술 개발 (0) | 2024.08.05 |
| 국토부, 섬 지역 드론배송 8월부터 본격 시행 (0) | 2024.07.30 |
| 현대차·기아, 인도네시아 AAM 사업 첫 발 (0) | 2024.07.29 |
| 국립중앙과학관, 30일 ‘드론전투 체험장’ 개장 (0) | 2024.07.29 |