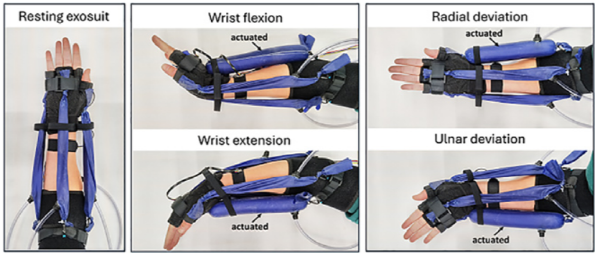
▲4개의 패브릭 공압 인공 근육(fPAM)으로 작동하는 소프트 엑소슈트
美 노트르담대학교 연구팀이 손목에 착용하는 재활용 소프트 엑소슈트를 개발했다. 공기압 방식으로 동작하기때문에 손목에 편하게 착용할 수 있으며, 제작 비용도 기존의 강성 제품에 비해 저렴하다는 설명이다.
테크엑스플로어 보도에 따르면, 노트르담대 마가렛 코드(Margaret Coad) 교수 연구팀은 소프트 액추에이터 방식의 소프트 엑소슈트를 개발하고 연구 논문을 학술 전문지인 ‘IEEE 트랜잭션스 온 메디컬 로보틱스 및 바이오닉스(Transactions on Medical Robotics and Bionics)’에 발표했다. (논문 제목:Soft Wrist Exosuit Actuated by Fabric Pneumatic Artificial Muscles)
마가렛 코드 교수는 "엑소슈트 설계시 신체와 장치 간의 정렬 불일치를 회피하는 것이 핵심적인 과제였다. 소프트 엑소슈트는 강성의 엑소슈트보다 이런 문제를 쉽게 처리할 수 있다. 우리의 설계 방식은 전통적인 모터가 아니라 소프트 액추에이터가 훨씬 가볍고 편안한 웨어러블 장치를 가능하게 한다는 것을 잘 보여준다"라고 말했다.
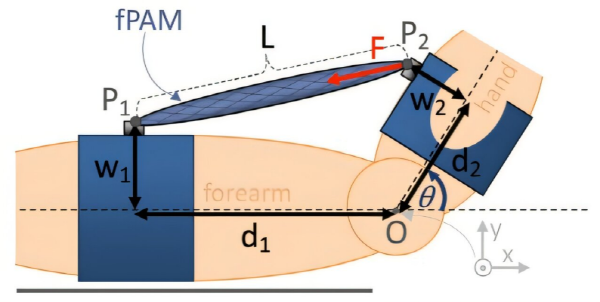
이 소프트 엑소슈트는 손목 주위에 4개의 소프트 엑추에이터를 장착했다. 액추에이터는 비틀어서 동물 모양을 만들 수 있는 모델링 풍선과 외형적으로 유사하다. 다만 고무로 만들어진 것이 아니라 매우 강하고 정교하게 짜여진 밀폐된 나일론 원단(패브릭 소재)으로 만들어졌다. 각각의 액추에이터는 팔뚝의 장착 지점부터 손가락 아래 지점까지 뻗어있다.
이 액추에이터는 팽창과 수축을 정밀하게 제어함으로써 인공 근육처럼 기능한다. 각 액추에이터들은 공기가 채워지면 손목을 끌어당기고, 공기가 빠지면 손목에서 멀어진다. 맞춤형 소프트웨어 프로그램을 통해 손목의 모든 측면을 지탱하고, 손목이 모든 방향으로 움직일 수 있도록 근육 간의 균형을 조정했다.
연구팀은 이 소프트 엑소슈트가 무게, 강성, 관절 정렬 불일치 등으로 인한 불편함을 해소할 수 있을 뿐 아니라 제작 비용도 저렴하다고 주장했다. 웨어러블 부위의 재료 비용이 불과 134달러다.
연구팀은 향후 손목 뿐 아니라 신체 다른 부위에 착용할 수 있는 새로운 디자인의 웨어러블 제품도 내놓을 것이라고 밝혔다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 中 허베이성 스자좡시에 AI 도로 청소 로봇 등장 (0) | 2025.03.18 |
|---|---|
| 로엔서지컬, 고려대 안암병원에 신장결석 수술로봇 '자메닉스' 공급 (0) | 2025.03.18 |
| 엔젤로보틱스, 올 상반기 ‘엔젤슈트 H10’ 출시한다 (0) | 2025.03.18 |
| '차지 로보틱스', 태양광 발전소 조립 및 설치 시스템 개발 (0) | 2025.03.17 |
| 日 나리타국제공항, 이동형 무인 판매 서비스 '핌토' 실증실험 실시한다 (0) | 2025.03.17 |