
▲ 버클리 캘리포니아 대학교의 엔지니어들이 곤충에서 영감을 받아 만든 새로운 비행 로봇은 호버링, 궤도 변경, 작은 목표물 타격까지 가능하다.
UC 버클리 연구팀이 호박벌에서 영감을 받아 직경 1cm도 되지 않는 세계 최소형 비행 로봇을 개발했다고 29일(현지 시각) 발표했다. 이 로봇은 무게가 21mg에 불과하며, 호버링(공중 정지), 궤도 변경, 작은 목표물 타격이 가능하다.
UC 버클리 기계공학과 리웨이 린(Liwei Lin) 석좌교수는 “벌은 탐색, 호버링, 수분(受粉) 등 유사한 크기의 인공 비행 로봇이 수행할 수 없는 놀라운 비행 능력을 갖추고 있다. 이번에 개발한 로봇은 벌이 꿀을 모은 후 비행하는 수분 메커니즘을 모방해, 지정된 목표물에 접근하고 타격하도록 무선으로 제어할 수 있다”고 설명했다.
이번 연구 성과는 학술 전문지 '사이언스 어드밴시스(Science Advances)'에 발표됐다. (논문 제목: Untethered subcentimeter flying robots)
▲ 비행 로봇의 작동 원리
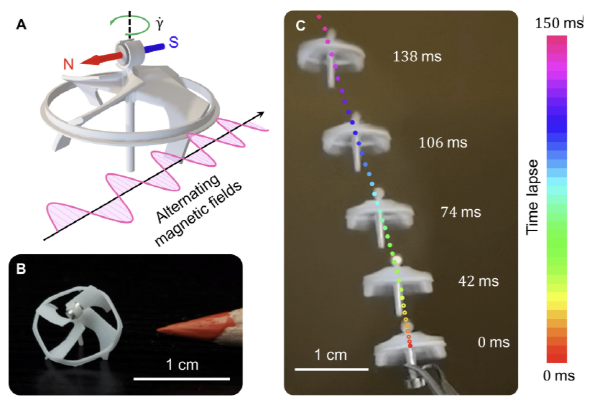
비행 로봇이 동작을 수행하려면 배터리와 비행 제어용 전자 장치를 장착해야 한다. 하지만 이를 초소형·초경량 장치에 통합하는 것은 큰 도전 과제다. 이를 해결하기 위해 린 교수팀은 외부 자기장을 이용해 전원을 공급하고, 비행 경로를 제어하는 방식을 활용했다.
이 로봇은 작은 프로펠러 형태로, 두 개의 소형 자석이 포함되어 있다. 외부 자기장의 영향을 받으면 자석이 서로 끌어당기거나 밀어내면서 프로펠러를 회전시키고, 로봇을 공중으로 띄울 수 있는 충분한 양력을 생성한다. 또한 자기장의 강도를 조절함으로써 로봇의 비행 경로를 정밀하게 제어할 수 있다.
연구팀에 따르면, 현재 비슷한 비행 능력을 가진 가장 작은 로봇의 지름은 2.8cm로, 이번에 개발된 로봇보다 약 세 배 크다.
논문의 공동 제1저자인 판핑 수이(Fanping Sui)는 “이 초소형 비행 로봇은 작은 구멍이나 복잡한 환경을 탐사하는 데 유용하며, 인공 수분, 파이프 내부 검사 등 다양한 응용 가능성을 지닌다”고 밝혔다.
현재 이 로봇은 수동 비행만 가능하다. 즉, 비행기나 첨단 드론과 달리 현재 위치나 궤적을 감지하는 센서가 내장되어 있지 않아 실시간으로 움직임을 조정할 수 없다. 따라서 정밀한 비행 경로를 설정할 수는 있지만, 강풍과 같은 갑작스러운 환경 변화에 취약할 수 있다고 연구팀은 설명했다.
연구팀은 향후 로봇이 자세와 위치를 실시간으로 조정할 수 있도록 능동 제어 기능을 추가할 계획이다. 또한, 현재 로봇을 작동하려면 강한 자기장을 제공하는 전자기장 코일이 필요하지만, 로봇의 크기를 직경 1mm 이하로 소형화하면 무게가 더욱 가벼워져 약한 자기장으로도 제어할 수 있을 것으로 기대하고 있다.
한편, 린 교수팀은 이번 비행 로봇 외에도 바퀴벌레에서 영감을 받은 로봇을 개발했다. 이 로봇은 바닥을 기어 다닐 수 있으며, 사람이 밟아도 견딜 정도로 내구성이 뛰어나다.
연구팀의 일원인 웨이 위에(Wei Yue)는 개미처럼 협력하여 단독으로는 불가능한 작업을 수행할 수 있는 ‘군집 로봇’을 개발하고 있다. 그는 “기어가고, 구르고, 회전할 수 있는 5mm 크기의 로봇을 연구 중이며, 이 로봇들은 협력하여 사슬이나 일정한 배열을 형성해 복잡한 작업을 수행할 수 있다. 예를 들어, 여러 대의 로봇을 인체 내부에 넣어 스텐트 형태를 이루거나, 혈전을 제거하는 등의 최소 침습 수술에도 활용할 수 있을 것”이라고 말했다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'드론' 카테고리의 다른 글
| 대한항공-美 안두릴, ‘자율형 무인기' 개발 협력 MOU 체결 (0) | 2025.04.03 |
|---|---|
| 한화, 美 GA-ASI와 협력해 무인기 체계 사업 진출 (0) | 2025.04.02 |
| 올해 국가주요시설 17곳에 '안티드론 시스템' 구축한다 (0) | 2025.03.25 |
| 美 코르부스 로보틱스 자율드론에 하니웰 스위프트 디코더 통합 (0) | 2025.03.18 |
| 이스라엘 포어사이트, 자율드론 3D인식에 엔비디아 젯슨 오린 사용 (0) | 2025.03.04 |