
▲ 박연묵 원익로보틱스 상무(미래기술본부장)이 지난달 28일 서울 강남구 한국과학기술회관에서 열린 'K-휴머노이드 로봇의 현재와 미래' 콘퍼런스에서 자사의 로봇손 관련 기술에 대해 소개하고 있다(사진=전승민 기자)
인간형(휴머노이드) 로봇 개발 과정에서 결코 간과할 수 없는 것이 바로 ‘로봇 손’이다. 휴머노이드 로봇이 일을 하려면 마치 사람처럼 다양한 물건을 능숙하게 취급할 수 있는 손이 필요한데, 현재 기술로 완벽하게 사람의 손을 흉내 내는 건 불가능하다. 이에 연구자들은 더 강한 힘으로 물건을 집어 올릴 수 있으면서도, 동시에 가볍거나 부드러운 물건, 깨지기 쉬운 얇고 가느다란 물건도 사람처럼 조심스럽게 다룰 수 있는 ‘만능 로봇 손’을 만들기 위해 노력해 왔다.
로봇 손 전문기업 ‘원익 로보틱스’의 박연묵 상무(미래기술본부장)는 지난달 28일 서울 강남구 한국과학기술회관에서 열린 'K-휴머노이드 로봇의 현재와 미래' 콘퍼런스 강연에서 ‘로봇 핸드의 발전과 실체적 응용’이란 제목으로 자사의 다양한 로봇 손 개발 과정을 공개했다.
원익 로보틱스는 원익 그룹 계열사로 2004년 2월 설립했으며, 최근 들어 로봇 손 연구 분야 기술력을 인정받고 있다.
박연묵 상무는 이날 “로봇이란 단어를쓰기 시작한 지 100년이 넘었지만 정말로 쓸만한 로봇을 찾기란 아직도 쉽지 않다”면서 “손을 만드는 기술이 부족한 것도 한 요인”이라고 소개했다. 박 상무는 “우리나라에서 내로라하는 필수 로봇 모듈 제품 중 한 가지로 ‘로보틱 핸드(로봇 손)’를 빼놓을 수 없다”며 “현재 원익 로보틱스 제품은 미국 빅테크 기업 ‘엔비디아’에서도 연구용으로 구매하고 있다”고 소개했다. “메타와도 로봇 손 연구를 공동으로 진행 중”이라고 덧붙였다.
로봇 손 개발은 쉽지 않은 일이다. 손가락 하나의 자유도(로봇의 관절)는 3~4개로, 로봇 팔 하나의 자유도와 큰 차이가 없다. 즉 좁은 책상 위에 로봇팔 3~5개를 올려놓고 동시에 구동시키며 한 가지 일을 협력해서 하도록 프로그래밍하는 것과 비슷한 상황이다. 여기에 최대한 사람과 비슷한 감각을 가질 수 있도록 각종 센서를 개발해 붙여야 한다. 최근엔 이런 감각을 통합해서 제어하는 ‘멀티모달’ 방식의 인공지능(AI) 제어기술까지 요구받고 있다.
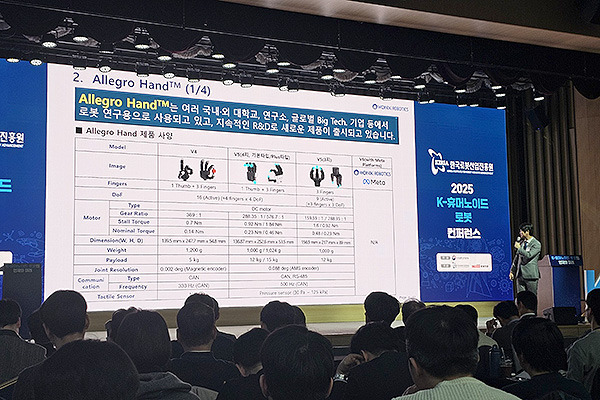
박 상무는 이날 발표에서 자사가 개발한 로봇 손인 ‘알레그로 핸드(Allegro Hand)’를 소개하며 “여러 국내외 대학, 연구소, 글로벌 빅테크 기업 등에서 로봇 연구용으로 사용되고 있고, 지속적 R&D로 꾸준히 새로운 제품을 출시 중”이라고 했다.
또 그는 “우리 로봇 손은 오픈소스 형식”이라며 “3D(3차원) 프린터를 이용해 누구나 만들 수 있다”고 소개했다. “이렇게 하면 누가 사 가겠느냐고 하겠지만, 실제로 센서 기술을 통해 차별화하고 있다”면서 “전용 촉각센서(Tactile Sensor)’를 적용해 다양한 상황에 적용할 수 있는 성능을 확보했다”고 자랑했다. 박 상무에 따르면 이 로봇 손을 통해 연구한 많은 과학기술자의 연구논문이 계속 발표되고 있다.
박 상무는 이날 강연에서 로봇 손을 이용해 실험한 영상을 공개했다. 커다란 주사위 같은 물건을 로봇 손으로 자유롭게 움직이는 모습이다. 그는 “이런 기술이 발전해 산업용 로봇 손 등에 장착되기 시작했고, 얼마 전엔 엔비디아의 최고 경영자인 ‘젠슨 황’도 ‘정말 멋지다(Super Cool)’고 평가하기도 했다”고 자랑했다.
박 상무는 로봇 손 기술의 중요성과 미래 전략에 관해서도 이야기했다. 그는 “미국의 자동차, 로봇 업체 ‘테슬라’의 CEO 일론 머스크가 로봇 ‘옵티머스’를 처음 공개하면서 가장 집중한 것이 바로 로봇 손이었다”고 설명했다. 그는 또 “로봇 몸체를 만드는 기술은 상향 평준화되고 있고 여러 나라에서 개발 중”이라면서 “그러나 로봇 손이 뛰어나지 않으면 작업성을 확보하기 어렵고, 기존 작업용 로봇에 쓰던 집게(그리퍼) 방식으로는 고도의 작업을 수행하는 데 한계가 있다”고 주장했다.
그는 “로봇 손은 독립적 분야로, 손 하나에 1억을 넘게 받는 해외 기업도 있다”면서 “이 분야에 집중해서 연구하면 2~3년 내 우리도 세계 최고 수준 로봇 손을 공급하는 일이 가능해질 것”이라고 밝혔다.
이어 박 상무는 “로봇다운 로봇을 개발하려면 해당 연구와 사업화를 통합 지원하는 생태계 구축이 필요한 상황이며, 이를 단일 기업이 하는 것은 무리가 있다”고 했다. 이어 “현재의 오픈 플랫폼 생태계를 계속해 구축해 나간다면 집안일도 척척 할 수 있는 휴머노이드의 등장도 기대할 만하다”고 강조했다.
▲ 박연묵 원익로보틱스 상무(미래기술본부장)가 지난달 28일 서울 강남구 한국과학기술회관에서 열린 'K-휴머노이드 로봇의 현재와 미래' 콘퍼런스에서 자사의 로봇손 관련 기술에 대해 소개하고 있다(사진=전승민 기자)
전승민 기자 enhanced@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'개인서비스로봇' 카테고리의 다른 글
| 中 물류로봇 기업 '여우이봇', 일본 시장 본격 진출 (0) | 2025.03.04 |
|---|---|
| [K-휴머노이드 로봇] LG전자 로봇엔 대뇌·소뇌가 따로 있다 (0) | 2025.03.04 |
| [K-휴머노이드 로봇] 휴머노이드 상용화를 위한 4가지 조건 (0) | 2025.03.04 |
| [단독] LG유플러스 개발 AI ‘익시’, 휴머노이드에 장착 (0) | 2025.03.04 |
| 하이코어, MWC 2025에서 자율주행 퍼스널 모빌리티 공개 (0) | 2025.03.04 |