
▲ 휴머노이드 로봇들이 상품 패키지 분류작업을 하고 있다(사진=피규어)
인공지능 로봇 스타트업 피규어가 휴머노이드 로봇이 컨베이어 벨트를 흘러가는 상품 포장(패키지)을 조작 및 분류하는 동영상을 26일(현지 시각) 공개했다. 이 작업에는 휴머노이드 로봇에게 사람 수준의 속도, 정밀도, 적응력을 요구한다.
피규어는 낮은 수준의 시각-운동(visuo-motor) 제어 정책인 ‘헬릭스 ‘시스템1(S1)‘을 개선하는 데 초점을 맞춰 상품 포장 조작 및 분류라는 도전적인 과제를 수행했다고 밝혔다. 피규어는 인지, 언어 이해, 학습된 제어를 통합하기 위해 ‘시각-언어-행동(VLA)’ 모델인 ‘헬릭스(Helix)’를 지난주 공개한 바 있다.
이번 기능 개선에 따라 헬릭스 시스템1은 풍부한 3D 이해도를 바탕으로, 보다 정밀한 심도 인식 동작을 구현할 수 있으며, 높은 성공률과 민첩성을 유지하면서 빠른 실행 속도를 달성할 수 있다.
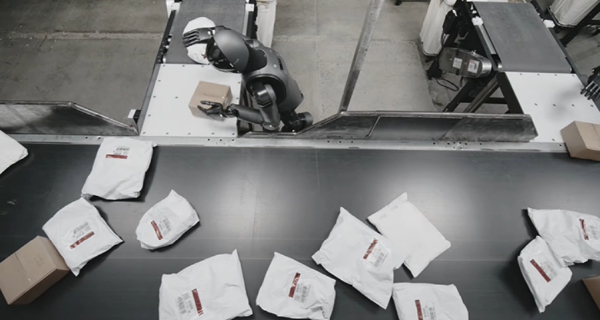
사진 설명을 입력하세요.
상품 패키지의 조작과 분류는 물류 작업의 기본에 속한다. 이 작업은 종종 한 컨베이어 벨트에서 다른 컨베이어 벨트로 패키지를 옮기고, 동시에 배송 라벨의 스캔 방향이 올바른지 확인하는 작업이 포함된다.
피규어에 따르면, 휴머노이드 로봇이 이 같은 작업을 수행하기위해선 몇 가지 중요한 과제를 해결해야한다. 상품 패키지는 단단한 상자부터 변형 가능한 가방까지 크기, 모양, 무게, 강성이 다양하기 때문에 시뮬레이션 상황에서 재현하는 것이 쉽지 않다. 따라서 헬릭스 시스템은 움직이는 물체를 파악하고 라벨이 노출되도록 패키지의 방향을 변경하는 최적의 순간과 방법을 결정해야 한다. 또한 지속적으로 움직이는 컨베이어 벨트에서 수많은 패키지의 동적 흐름을 추적하고 높은 처리량을 유지해야 한다. 또한 환경을 완벽하게 예측할 수 없기 때문에 시스템은 스스로 수정할 수 있어야 한다.
피규어는 이같은 일련의 과제를 수행하기위해 헬릭스 시스템1을 개선해 적용했다고 밝혔다. ’스테레오 비전(정확한 깊이 인식)‘, ’멀티 스케일의 시각 표현‘, ‘각 로봇들의 자기 조정 능력’, ‘트레이닝 시간의 고속화’ 등을 실현했다는 설명이다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 中 '충칭 마라톤 대회'에 휴머노이드 로봇도 참가 (0) | 2025.03.04 |
|---|---|
| [K-휴머노이드 로봇] 휴보 아빠의 일성 “한국 휴머노이드엔 ‘현재’가 없다” (0) | 2025.03.04 |
| 생추어리 AI, 휴머노이드 로봇에 새로운 촉각 센서 탑재 (1) | 2025.02.27 |
| 현대글로비스, 보스턴 다이나믹스 물류 로봇 '스트레치’ 국내 공개한다 (0) | 2025.02.27 |
| 서울시, 전기차 자율 충전 로봇 ‘서울 보이’ 도입 (0) | 2025.02.27 |