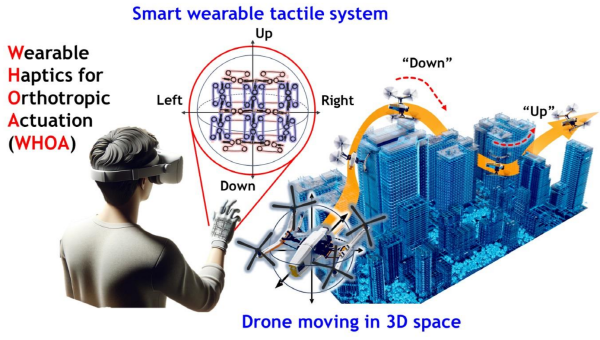
▲ 3D 환경 내 공간 인지를 도와 가상 및 실제 환경에서 드론 제어를 돕는 방향 정보 햅틱 피드백 구현
KAIST 연구진이 원격 제어하는 드론이 수집한 공간 데이터를 촉각 피드백을 통해 직관적으로 조종자가 이해할 수 있도록 하는 웨어러블 햅틱 기술을 개발했다.
KAIST는 기계공학과 오일권 교수 연구팀이 형상기억합금 와이어를 직교 중첩 구조의 메타구조 패턴으로 매듭지은 독립적인 직교 방향 거동이 가능한 ‘직교 방향 제어 웨어러블 햅틱(WHOA)’ 기술을 개발했다고 21일 밝혔다.
이 기술의 핵심 소재인 형상기억합금은 특정 온도로 가열하면 변형된 상태에서 원래 형태로 돌아오는 특수 금속으로 촉각을 구현하는 작동기로 사용되었다. 연구팀은 가볍고 단순한 직교 메타구조로 3차원 공간정보를 촉각으로 재구성할 수 있는 기술을 개발해서 공간 인식 기반 햅틱 내비게이션의 새로운 영역을 개척했다.
연구팀이 개발한 이 기술은 시각 정보에 의존하지 않고도 주변 환경을 ‘느낄 수’ 있는 방식으로 재난, 화재, 극한환경에서 효과적인 모빌리티 제어를 가능하게 한다. 특히, 시각 정보가 제한되는 상황에서도 공간정보를 직접 감지할 수 있어, 기존 방식보다 안정적이고 효율적인 조작이 가능하다.
촉각 피드백은 좌, 우, 상, 하, 전진, 후진 같은 공간 이동뿐만 아니라 전방 장애물 감지 시 독특한 햅틱 패턴까지 전달하도록 설계됐다. 이 기술은 재난 구조와 긴급 구호 작업 같은 중요한 상황에서 작업 효율성과 안전성을 크게 끌어올릴 가능성을 보여준다.
이 기술은 서로 수직인 독립된 촉감 모드를 생성하며, 이를 통해 팔이나 발에 착용했을 때 사용자에게 입체 공간정보를 촉감으로 전달할 수 있다. 이는 내비게이션과 원격 조작을 보다 직관적으로 수행할 수 있도록 보조한다.
WHOA를 착용하면 가로, 세로 방향의 독립적인 촉각 모드 조합을 통해 사용자는 입체적인 공간정보 피드백을 받는다. 특히 이 기술은 신발 내부의 작은 공간에서도 동작하도록 설계되어 장시간 착용할 시 피로를 최소화하는 동시에 손이 자유로운 상태에서 직관적으로 다음 이동 방향을 파악할 수 있어 실용성이 뛰어나다.
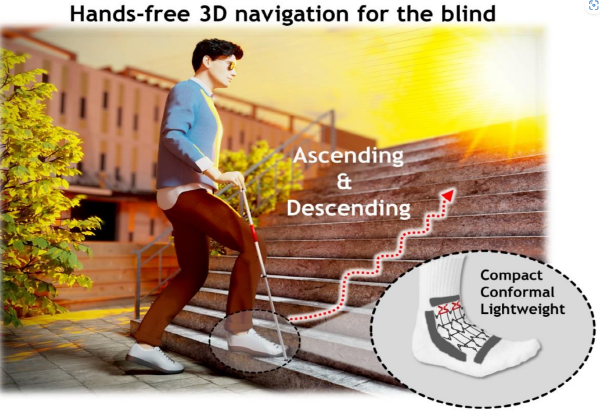
▲ 컴팩트하고 가벼운 설계의 WHOA 액추에이터를 발에 착용한 시각장애인이 공간 촉감 피드백을 받아 3D 방향감각 보조를 받는 모식도
연구팀은 WHOA를 적용한 드론 내비게이션 시스템을 가상현실(VR) 환경에서 실증했다. 화재 현장의 건물을 배경으로 한 시뮬레이션에서 WHOA를 착용한 사용자는 드론을 조종하며 위험 구역을 회피하고 구조 작업을 수행했다.
드론이 수집한 공간 데이터는 촉각 피드백으로 사용자에게 전달되며, 연기와 잔해로 시야가 제한된 환경에서도 직관적으로 상황을 파악하고 드론을 제어할 수 있도록 보조한다.
오일권 교수는 “이번 기술은 시각장애인이 촉감을 활용해 길을 안내받을 수 있는 새로운 형태의 내비게이션 기법”이며 "착용형 햅틱 인터페이스는 입체적 공간정보를 촉감으로 전달하여 재난, 화재 환경 또는 국방의 MUM-T(유무인 협력 전투체계)에서 드론이나 로봇의 원격제어에 활용될 수 있다"라고 말했다.

▲ 오일권 교수 연구팀이 ‘직교 방향 제어 웨어러블 햅틱(이하 WHOA)’ 기술을 개발했다고 밝혔다.
오세웅 박사와 마난 칸(KHAN) 석사가 공동 제1 저자로 참여한 이번 연구 성과는 첨단 소재 분야 국제학술지 ‘어드밴스드 머티리얼스(Advanced Materials)’에 지난 1월 8일 게재됐다.(논문명: Wearable Haptics for Orthotropic Actuation Based on Perpendicularly Nested Auxetic SMA Knotting)
한편, 이번 연구는 과학기술정보통신부와 한국연구재단이 추진하는 중견연구지원 사업으로 수행됐다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'로봇부품·소프트웨어' 카테고리의 다른 글
| 씨드로닉스, AI 센서 모듈 선급 형식 승인 획득 (0) | 2025.01.22 |
|---|---|
| 세이지 세이프티, 한국정보통신기술협회 'GS인증' 획득 (1) | 2025.01.22 |
| 공기흐름까지 감지하는 ‘전자피부’ 등장 (0) | 2025.01.21 |
| 美 아이노스, 인공지능 코 기술 보급 '아이노스 얼라이언스 이니셔티브' 시작 (0) | 2025.01.15 |
| 디지털 트윈으로 로봇과 차량, 사람 간 충돌 막는다 (0) | 2025.01.15 |