
▲김종현 셩균관대 교수가 다섯번째 초청강연을 하고 있다.
김종현 셩균관대 교수는 4일 오후 대전컨센션센터 그랜드볼룸에서 '치료용 재활로봇의 과거 및 현재, 그리고 앞으로 나아가야 할 방향'을 주제로 다섯번째 초청강연을 했다.
김 교수는 강연을 통해 의료전문서비스 로봇 중 하나인 치료용 재활로봇 분야는 2000년대 초반부터 각광받기 시작하였으며, 현재에는 기업들이 개발한 다양한 재활로봇들이 임상 현장에서 실제로 활용되는 단계까지 발전되어 왔다고 말했다. 그러나 다른 측면에서는 지금까지의 많은 발전에도 불구하고 재활로봇은 여전히 부족한 부분이 많다고 인식되고 있고, 이로 인해 임상 활용 및 시장 확산의 한계가 드러나고 있는 것 또한 사실이라며 치료용 재활로봇 역시 의료기기이기에 시장 경쟁력을 위해서는 의료기술로서의 독창성 및 실용성에서의 강점을 가져야 한다는 점에서는 예외가 아닐 것이라고 말했다.
김 교수는 하지만 지금까지의 재활로봇은 이러한 현장의 요구를 잘 만족시켜주지 못하고 있으며, 결국 이러한 문제점을 극복해야만 재활로봇이 한 단계 도약할 수 있을 것이라며, 치료용 재활로봇이 임상 현장에서 보여준 현실을 직시하면서 김 교수가 느꼈던 기존 재활로봇의 대표적인 문제점, 그리고 재활로봇이 임상 현장에서 잘 활용되기 위해 필요한 임상 환경 변화에 대한 고민을 공유했다. 또한 이러한 산적한 문제들을 해결하기 위한 본인의 노력에 대해 소개하며 미래의 치료용 재활로봇이 나아가야 할 방향에 관하여 이야기했다.
김 교수는 치료용 재활로봇의 발전 방향으로 결국 로봇이 로봇만의 독창적인 어세스먼트 방법들을 개발해 이를 통해서 치료의 테라피 플닝을 해줄 수 있을 때 자율도(Autonomy)가 향상되고 개인화 대응이 될 것이라고 말했다. 그는 그렇게 되면 로봇의 가치가 훨씬 높아져서 더 지능형 재활 로봇으로 될 수가 있고, 이에 따라 의료기기로서의 가치도 제고되고 치료 효과가 높아지고 운용이 쉬워지기 때문에 병원 보급이 확대될 수 있을 것이라고 강조했다.
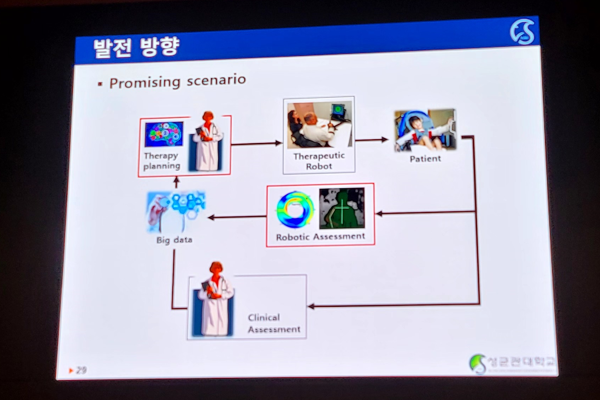
김 교수는 연구자분들이 로봇 하드웨어나 제어를 연구하는 것도 중요하지만 이런 부분의 연구에도 관심을 가져달라고 당부했다. 그는 테라피 플래닝을 잘 하려면 결국 AI 베이스 어프로치로 갈 수 밖에 없다며, 이렇게 할 때 재활 쪽에서의 문제점은 데이터 양이 많이 필요하다는 것이고 데이터 양을 많이 확보하려면 환자들에게 데이터를 얻기가 굉장히 어려운 상황이니 버츄얼한 페이션트 모델을 만들어러닝을 계속 해 보는 방법들을 시도해 봐야 되지 않을까 생각한다고 말했다.
조규남 전문기자 ceo@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'종합' 카테고리의 다른 글
| 국방부, '국방 데이터·인공지능 확산주간' 행사 개최 (1) | 2024.07.05 |
|---|---|
| [ICROS 2024] '로봇 자율 이동을 위한 공간 지능(Spatial AI for Robot Navigation)' (0) | 2024.07.05 |
| [ICROS 2024]'2024 제어로봇시스템학회 학술대회 (ICROS)' 성료 (0) | 2024.07.05 |
| [ICROS 2024]우수신진연구자세션③ (0) | 2024.07.04 |
| [ICROS 2024] 드론 기반 풍력 발전기 점검 시장과 사업의 확장 (0) | 2024.07.04 |