엘리시움 로보틱스(Elysium Robotics)가 휴머노이드 로봇이나 인공 보철 등에 활용할 수 있는 인공 근육을 개발했다고 로보틱스 247이 지난 24일 보도했다. 엘리시움은 이 인공근육을 사용해 27 자유도의 로봇 핸드를 1000달러 이하로 만들 수 있다고 밝혔다.
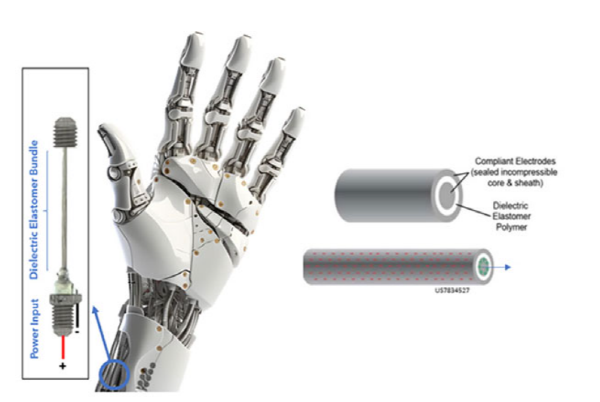
이번에 개발된 소프트 로봇을 위한 ‘유전체 탄성중합체 액추에이터’(DEA·dielectric elastomer actuator)는 사람의 근육과 유사한 성능을 지니고 있으며 저비용으로 대량 생산할 수 있는 게 특징이다. 섬유에 전압을 걸어 인간 근육과 마찬가지로 장력을 조절하고 크기와 강도를 조절할 수 있다.
엘리시움의 공동 설립자인 마크 해먼드(Mark Hammond)는 이 액추에이터가 저비용 로봇 핸드를 생산하는 데 사용될 수 있다고 말했다.
그는 현재 휴머노이드에 대한 관심이 높지만 아직은 개념 증명단계를 넘어서는 데 어려움을 겪고 있으며 인간의 능력과 휴머노이드 성능 사이에는 큰 격차가 존재한다고 말했다. 단일 목적을 갖고 있는 협동로봇이 산업 환경에 널리 채택되고 있지만 범용 휴머노이드 로봇은 그 잠재력에도 불구하고 여전히 대부분 미개발 상태라고 설명했다. 제작 비용, 무게, 부피, 비효율적인 배터리 사용 및 소음 등 여러 문제가 있다는 지적이다.
엘리시움 로보틱스에 따르면 유전체 탄성중합체는 인간의 골격근과 유사하다. ‘인공 근육’은 효율적이고 강력하며 가벼운 작동(액추에이션) 기술에 대한 탐구의 일환으로 만들어졌으며, 유전체 탄성 중합체가 주목을 받고 있다.
DEA는 1990년대 등장한 이래 소프트 액추에이터의 유망한 후보였으며 주로 탄성적인 특성, 전기에 의한 활성화, 빠른 작동 속도 및 높은 작업 밀도로 인해 '인공 근육'으로 불렸다. 모두 인간 골격근의 특성과 유사하다는 것이다.
엘리시움 공동 설립자들은 박막 형태의 유전체 탄성중합체에 대한 연구가 그동안 많이 이뤄졌지만 극도로 복잡한 제작 과정을 거쳐야만 인간의 골격근에 버금가는 힘을 만들어낼 수 있다는 한계가 있었으며 이 같은 요인이 실용적인 사용을 제한하고 있다고 설명했다.
이번에 개발한 DEA는 인간 골격근을 더 가깝게 모방하고 새로운 구조를 가능하게 하기 위해 섬유 형태를 갖추고 있다. 엘리시움은 이번에 근육과 같은 액추에이터를 만드는 데 필요한 치수(dimentions)와 특성을 지닌 섬유를 생산했다고 밝혔다. 엘리시움의 설계는 모터, 기어박스 또는 다른 움직이는 부품을 필요로 하지 않는다. 이 액추에이터는 소음이 적으며 150kPa의 강도를 갖고 있으며, 50mm초의 실행 시간을 갖고 있다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'로봇부품·소프트웨어' 카테고리의 다른 글
| 佛 코발, 카본 진공 그리퍼 출시 (0) | 2024.07.04 |
|---|---|
| 영국 브리스톨대, 물체를 자유자재로 회전시키는 로봇 핸드 개발 (0) | 2024.07.01 |
| 바슬러, 로보셉션 지분 25.1% 인수로 3D 비전 솔루션 강화 (0) | 2024.06.27 |
| 시에라베이스, 일본 시장 진출 타진...日 협력사 아큐버 통해 'COMNEXT 2024' 출품 (0) | 2024.06.27 |
| 엑스와이지-고퀄, ‘건물 관제 통한 로봇 애플리케이션 개발’ MOU (0) | 2024.06.25 |