
美 노스캐롤라이나 주립대 연구팀은 인공지능(AI)과 컴퓨터 시뮬레이션을 활용해 외골격 로봇 착용자가 외골격 착용 훈련 기간과 운동 에너지를 크게 줄일 수 있는 새로운 기술을 개발했다고 밝혔다.
연구팀은 이번 연구 성과를 과학저널인 ‘네이처’에 발표했다.(논문 제목:Experiment-free Exoskeleton Assistance Via Learning in Simulation)
논문 교신 저자인 하오 수(Hao Su) 교수는 “이번 연구는 인간의 이동성과 건강을 향상시킬 수 있는 웨어러블 로봇을 자율적으로 제어하기 위해 시뮬레이션과 현실 사이의 간극을 메우는 새로운 기계학습 프레임워크를 시연했다”고 말했다.
하오 수 교수는 "외골격은 인간의 운동 능력을 향상시킬 수 있는 엄청난 잠재력을 갖고 있지만, 장시간의 인간 실험과 수작업 방식의 제어법으로 인해 외골격 로봇의 개발과 광범위한 보급이 제한되고 있다“면서 ”이번 연구를 통해 휴대용 외골격 로봇에 체화돼 있는 인공지능(embodied AI)이 컴퓨터 시뮬레이션을 통해 사람들이 걷고, 뛰고, 오르는 것을 돕는 방법을 학습할 수 있다“라고 말했다.
이번에 연구팀은 체화된 인공지능 시스템의 자율 제어 기능을 개선하는 데 초점을 맞췄다. 외골격 로봇은 다양한 움직임으로 신체가 건강한 사람들을 돕는 방법을 학습할 수 있다.
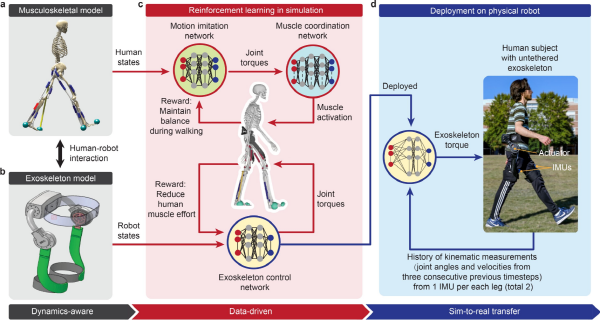
일반적으로 외골격 로봇은 사용자들이 걷고, 뛰고, 계단을 오르는 것을 돕기 위해 얼마나 많은 힘이 필요한지, 그리고 언제 힘을 가해야 하는지를 알기 위해 수시간에 걸쳐 외골격을 착용하고 훈련해야한다. 이번에 개발된 새로운 방법은 사용자들이 외골격 훈련 과정없이 즉시 활용할 수 있도록 해준다.
하오 수 교수는 "이 작업은 본질적으로 공상과학소설을 현실로 만들어준다. 사람들이 다양한 일을 수행하는 동안 에너지를 덜 소모할 수 있도록 한다”고 말했다.
사람을 대상으로 한 실험에서 연구팀은 참가자들이 외골격을 착용하고 걷을 때 외골격이 없을 때보다 24.3% 더 적은 운동 에너지를 사용한다는 것을 발견했다. 달릴 때와 계단을 오를 때 외골격 비착시에 비해 각각 13.1%와 15.45% 더 적은 에너지를 사용했다.
연구팀은 이번 연구가 건강한 사람들을 대상으로 이뤄졌지만 이동성 장애가 있는 사람들을 돕기 위한 로봇 외골격 응용 프로그램에도 적용될 수 있다고 주장했다. 하오 수 교수는 "우리는 이 새로운 방법을 노인들과 뇌성마비와 같은 신경학적 질환을 가진 사람들이 사용하고 있는 외골격에서 시험하는 초기 단계에 있다. 또한 우리는 이 방법이 다리 절단 환자들을 위한 로봇 보철 장치의 성능을 어떻게 개선시킬 수 있는지를 탐구하는 데에도 관심이 있다"고 말했다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 中 딥블루테크놀로지, 상업용 청소 로봇 대거 선봬 (0) | 2024.06.17 |
|---|---|
| 中 HG테크, 지능형 레이저 제초 로봇 개발 (0) | 2024.06.17 |
| 지능형 검사 로봇, 中 해저 터널 점검에 투입 (1) | 2024.06.13 |
| 中 베이징시, 창핑에 첨단 로봇 산업 클러스터 조성 (1) | 2024.06.13 |
| 美 알고 로보틱스, AMR에 엔비디아 아이작 로봇 기술 통합 (0) | 2024.06.13 |