
▲ 로봇의 구조와 동작 원리
독일 막스플랑크 지능시스템연구소, 중국 하얼빈공대, 홍콩과학기술대 공동 연구팀이 외부 전원에 의존하지 않고, 파이프 등 관(튜브) 모양의 구조물 내부를 이동할 수 있는 무선 소형 로봇을 개발했다고 밝혔다.
연구팀은 이번 연구 성과를 전문 학술지인 ‘사이언스 로보틱스’에 발표했다.(논문 제목:Wireless flow-powered miniature robot capable of traversing tubular structures)
이 무선 소형 로봇은 파이프 손상을 최소화하면서 복잡한 유지보수 문제를 효과적으로 해결하는 데 도움을 줄 수 있다. 그동안 사회기반 시설을 유지 및 관리할 수 있는 여러 로봇들이 개발됐지만 외부 전원에 의존해야 하기 때문에 실제 적용하는 데는 한계가 있었다.
연구 논문 공동 저자인 원츠 후는 테크엑스플로어와의 인터뷰에서 “유체가 흐르는 관 구조물을 통과할 수 있는 밀리미터 크기 무선 로봇은 원자력, 산업 및 의료 등 분야에서 검사, 유지보수에 활용할 수 있는 상당한 잠재력을 갖고 있다. 하지만 외부 전원에 대한 전반적인 의존은 로봇의 작동 범위와 적용 가능한 환경을 제약한다"고 말했다.
그동안 개발된 무선 유지보수 로봇은 외부 전원에 의존하는 로봇에 비해 크고, 시간적인 제약이 있으며, 기능도 적은 것으로 나타났다.
이번에 개발된 무선 로봇은 튜브형 구조물 내에서 더 긴 거리를 이동할 수 있으며 동력 고갈없이 장시간 일상적인 유지보수 작업을 수행할 수 있다는 게 연구팀의 설명이다.
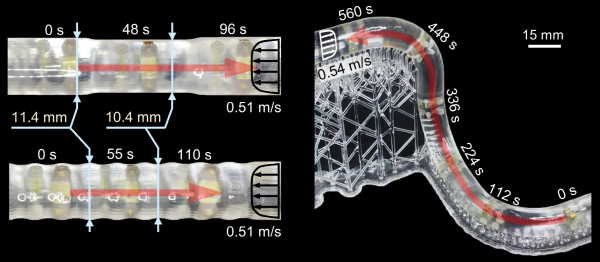
▲ 로봇이 파이프 내부를 통과하는 원리
연구팀은 "우리 로봇은 유동 동력(flow power)을 사용하기 위한 유동 동력 모듈, 변환된 기계적 에너지를 로봇의 운동 시스템으로 전달하기 위한 이중 출력 소형 기어박스, 복잡한 튜브에서 적응형 운동을 위한 키리가미(종이접기형) 소프트 휠 등 세 가지 주요 구성 요소를 통합해 만들어졌다”며, "유동 동력 튜브 밀리로봇은 복잡한 파이프라인에서 제어 가능한 업스트림/다운스트림 장거리 내비게이션 기능을 제공한다“고 강조했다.
연구팀은 이번에 개발된 바퀴 달린 밀리미터 크기 로봇이 관 모양의 구조물 안에 있는 유체의 흐름을 기계적인 에너지로 바꿀 수 있는 내부 추진체를 갖고 있으며 외부의 자기(마그네틱)를 적용하는 것 만으로도 로봇의 이동 방향을 조절할 수 있다고 설명했다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 美 노스웨스턴대, 스마트 로봇용 인공지능 알고리즘 개발 (0) | 2024.05.07 |
|---|---|
| 中 세계 첫 내저온 자동 수소 충전 로봇 공개 (0) | 2024.05.07 |
| 中 5G 원격 로봇 수술..."상하이서 바다 건너 섬 병원 연결" (0) | 2024.05.07 |
| 美 서브로보틱스, 加 마그나와 협력 강화 (0) | 2024.05.07 |
| 음악을 연주하는 로봇연주단 '로봇드러머 앤트와 친구들' (0) | 2024.05.03 |