미국 하버드대 마이크로로봇연구소 연구팀이 초소형 비행 로봇 '로보비(RoboBee)'가 지면에 안전하게 착륙할 수 있는 기술을 개발했다고 밝혔다.
2013년부터 하버드대가 개발해 온 로보비는 꿀벌처럼 날갯짓하며 공중을 날거나, 공중에서 정지하는 호버링 동작을 수행할 수 있다. 하지만 날개 길이가 3cm, 무게가 0.1g 정도에 불과할 정도로, 작고 가벼워 안정적인 착륙이 힘들었다.
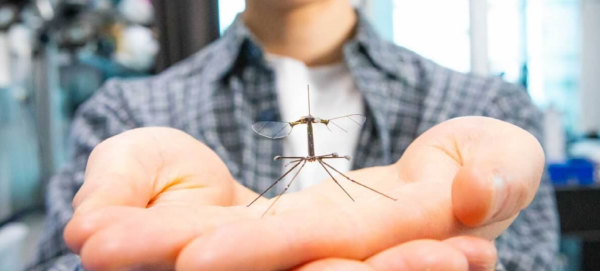
로버트 우드(Robert Wood) 하버드대 교수팀은 초소형 비행 로봇에 관절이 있는 4개의 긴 다리를 부착해 공중에서 보다 쉽게 착륙할 수 있도록 로봇을 새로 설계했다. 이 로봇은 지면에 접근할 때 속도를 줄여 부드럽게 착지하도록 돕는 제어 시스템도 채택했다. 이번 연구 성과는 로봇 전문 학술지 '사이언스 로보틱스(Science Robotics)'의 표지논문에 선정됐다. (논문 제목: Sticking the landing: Insect-inspired strategies for safely landing flapping-wing aerial microrobots)

▲ 착륙장치를 탑재한 로보비(사진=하버드대)
연구팀은 긴 다리를 갖고 있는 곤충인 '각다귀(crane fly)'에서 영감을 얻어 로보비에 긴 다리 형태의 안정적인 착륙 장치를 탑재했다. 이 착륙 장치는 비행 로봇의 날갯짓을 만들어내는 섬세한 '압전 액추에이터'를 보호하고, 거친 착륙 과정과 충돌 시에 로봇이 손상되지 않도록 내구성을 높인다. 이전 모델에서는 헬리콥터 프로펠러가 지표면 근처에서 강한 바람을 일으키는 것 처럼, 날갯짓으로 인해 발생하는 공기 와류 때문에 상당한 '지면 효과(ground effect, 헬리콥터가 지면이나 수면 가까이 비행할 때 발생하는 공기역학적 현상)'와 불안정성 현상을 겪었다.
논문 공동 저자인 대학원생 크리스찬 챈(Christian Chan)은 "이전에는 착륙을 시도할 때, 지면에서 약간 떨어진 높이에서 동력을 끄고 안전하게 착륙하기를 바라는 수밖에 없었다"라고 설명했다. 공동 제1 저자인 박사후 연구원 현낙승(현 퍼듀대 교수)씨는 로봇 제어 시스템이 지면 효과에 적응하도록 개선하는 과정을 주도했다. 현 박사는 딱딱한 표면뿐만 아니라 나뭇잎 위에서도 로봇이 안정적으로 착륙하는 제어 과정을 실험했다. 그는 "비행체의 성공적인 착륙은, 충돌 직전 표면에 접근하는 속도를 최소화하고, 충돌 후 에너지를 빠르게 소멸시키는 데 달려 있다. 로보비의 작은 날갯짓에도 불구하고 지표면 가까이에서 비행할 때 지면 효과는 무시할 수 없으며, 충돌후 튕겨 오르거나 넘어지면서 상황이 더욱 악화될 수 있다"고 말했다.

▲ 로보비가 나뭇잎에 착륙하고 있다(사진=하버드대)
연구팀은 각다귀의 긴 다리가 착지 시 충격을 완화하는 기능을 갖고 있는 것으로 추정했다. 연구팀은 하버드 비교동물학 박물관 데이터베이스의 표본 기록을 바탕으로, 다양한 다리 구조의 프로토타입을 제작했으며, 최종적으로는 각다귀의 다리 구조와 관절 위치와 가장 유사한 디자인을 채택했다.
현재 로보비는 외부 제어 시스템(오프보드시스템)에 '연결된(tethered)' 상태로 작동한다. 연구팀은 향후 온보드 전자장치를 통합해 로봇 센서, 전력 및 제어 자율성을 확보하고, '연결된' 상태를 제거하는 데 집중할 계획이라고 밝혔다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 美 파이저·지비드·코그니보틱스, 빈픽킹 시스템 공개 (0) | 2025.04.22 |
|---|---|
| 고성, 명령 알아듣는 AI 휠체어 '스마트 체어' 공개 (0) | 2025.04.22 |
| 휴머노이드 하프 마라톤대회 챔피언 '톈궁', 2.0 버전 공개 (0) | 2025.04.21 |
| 中 휴머노이드 로봇 기업 '피봇', 엔젤 투자 누적 200억원 육박 (0) | 2025.04.21 |
| 씨메스, '2025 국제물류산업대전'서 랜덤 박스 팔레타이징 솔루션 선보인다 (1) | 2025.04.21 |