▲ 'PAWS'를 적용한 4족 보행 로봇(이미지=델프트공대)
네덜란드 델프트공대(TU 델프트)와 EPFL 연구팀이 모터 없이도 네발 동물처럼 달릴 수 있는 4족 보행 로봇을 개발했다.
혁신적인 역학과 데이터 기반 기술을 결합한 이번 연구 성과는 전문 학술지인 '네이처 머신 인텔리전스(Nature Machine Intelligence)'에 발표됐다.(논문 제목:Synergy-based robotic quadruped leveraging passivity for natural intelligence and behavioural diversity)
연구팀에 따르면, 네발 동물은 다양한 지형을 횡단하는 데 놀라운 능력을 갖고 있으며 다양한 행동과 걸음걸이 패턴을 보여준다.
시스템의 '자연스러운 역학'을 활용해 네발 동물과 같은 성능을 달성할수 있는 로봇을 개발하는 것은 로봇 연구자들의 핵심적인 목표다. 코시모 델라 산티나(CosimoDella Santina) 델프트공과대 교수는 “상업용 4족 보행 로봇이 점차 보급되고 있지만, 에너지 비효율성으로 인해 작동 시간에는 제약이 있다”며 “우리의 목표는 생물학적 시스템의 효율성을 모방해 로봇의 메커니즘을 최적화함으로써 이 문제를 해결하는 것이다”라고 연구 배경을 설명했다.
코시모 델라 산티나 교수는 이러한 접근 방식을 설명하기 위해 자연에서 일어나는 놀라운 현상을 예로 들었다. 그는 물고기가 물살에 휩쓸리지 않기 위해 헤엄치는 영상을 보여줬다. 이 물고기가 죽어 있었다는 사실을 밝히기 전까지는 평범해 보이는 장면인데, 연구팀은 물고기의 움직임은 의식적인 노력이 아니라 몸의 수동적 역학에 의해 전적으로 이뤄진다고 설명했다. 델라 산티나 교수는 “이 장면은 최적화된 메카니즘만으로도 효율적인 움직임을 이끌어낼 수 있다는 것을 보여준다”고 말했다.
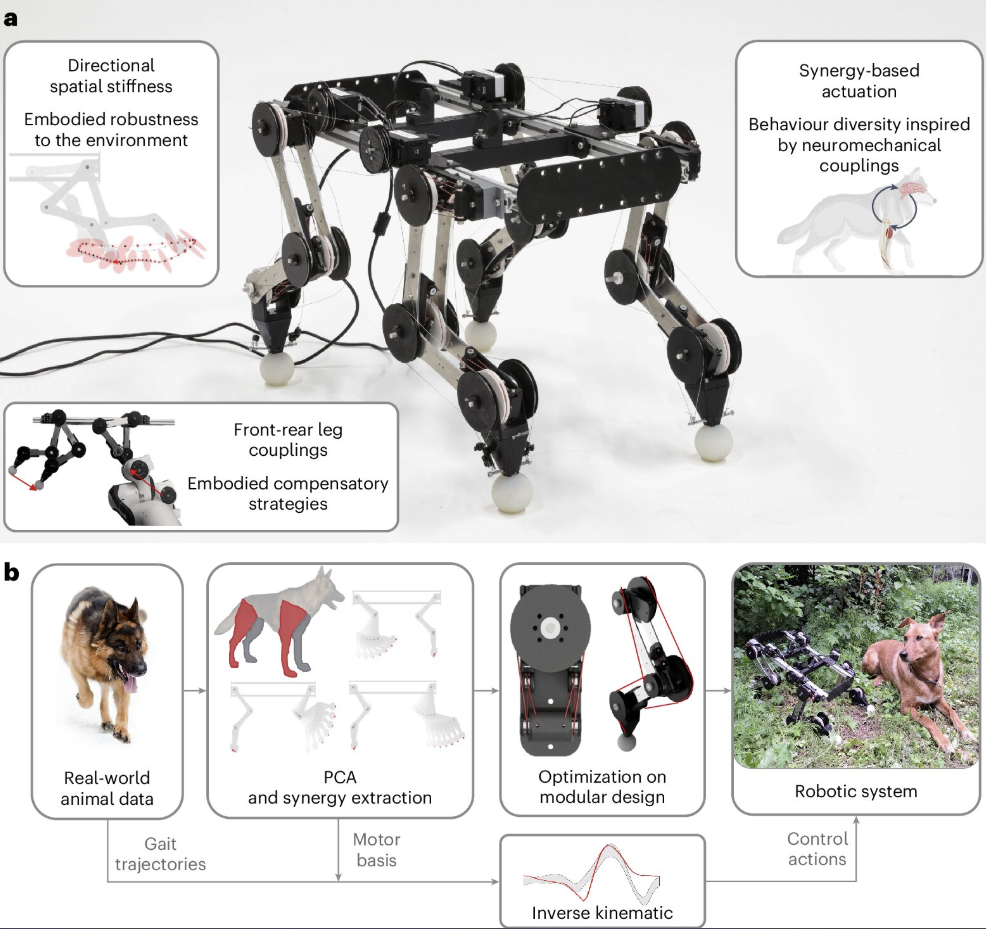
이러한 사례에서 영감을 받아 연구팀은 최소한의 작동(minimal actuation)을 통해 시스템의 능동적 제어 성능을 유지하면서도, 로봇의 몸과 수동적 특성을 활용하려는 생체 영감적인 접근 방식을 채택한 결과 시너지 효과를 높일 수 있는 4족 보행 로봇 시스템 ‘PAWS(passive automata with synergies)’를 설계했다.
연구팀은 헬스기구인 머신러닝을 활용해 개의 움직임에 관한 데이터를 분석하고, 로봇 구조에 스프링, 케이블, 탠덤 등을 배치했다. 그 결과, 로봇이 모터 없이도 오로지 러닝머신의 힘만으로 러닝머신 위를 걸을 수 있으며, 다양한 속도에 적응할 수 있다는 것을 확인했다. 이 로봇은 4개의 액추에이터만을 갖추고 있으며, 환경 교란에 대한 수동적 견고성, 다양한 작동 행동을 포함해 동물과 같은 역동적인 반응을 나타냈다.
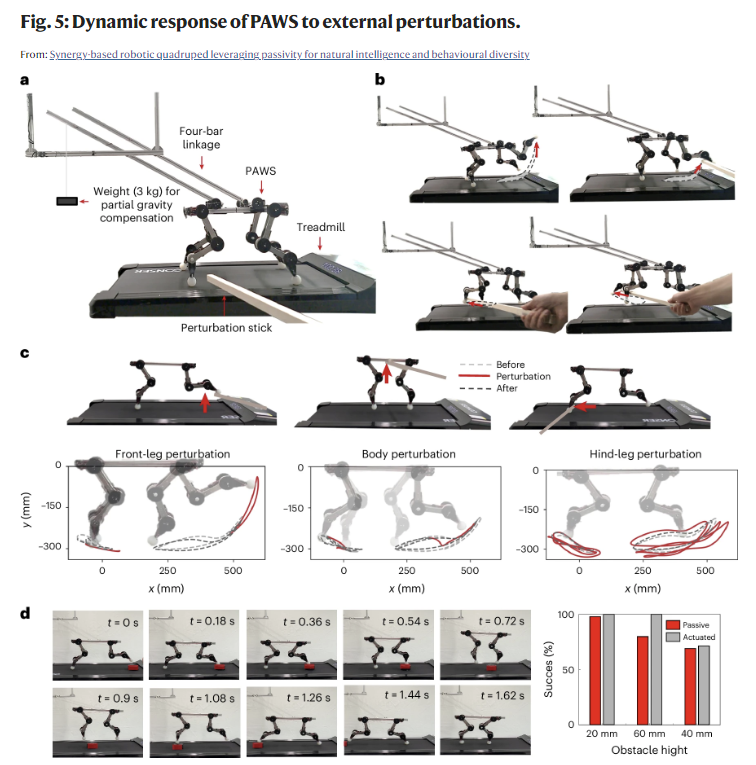
▲환경 변화에 따른 4족 보행 로봇의 적응 과정을 테스트하고 있다.
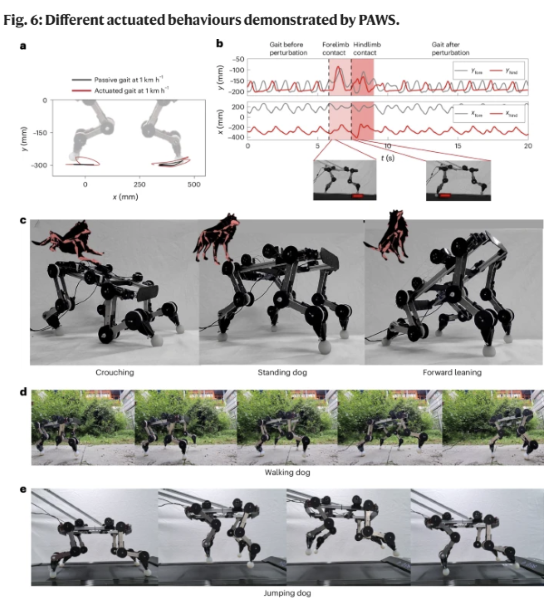
▲4족 보행로봇의 다양한 동작을 테스트하고 있다(이미지=델프트공대)
연구팀은 로봇이 수동적으로 작동하는 동안 로봇에 모터를 장착해 기능을 추가했다. 델라 산티나 교수는 “모터를 통해 로봇은 계단을 오르거나 장애물을 피하는 등의 도전적인 과제에 반응할 수 있다. 하지만 로봇의 최적화된 기계적 설계 덕분에 모터의 사용은 최소화되었다”고 말했다. 연구팀은 이러한 혁신이 총체적으로 지능적 로봇을 만들기 위한 중요한 진전을 의미한다고 했다.
연구팀은 이번 연구가 기계적인 물리 지능의 발전에 기여하며, 시너지 효과적인 동작, 순응적인 신체 특성 및 구현된 보상 전략을 결합함으로써 로봇에게 보다 효율적이고 자연스러운 이동을 제공할수 있다고 밝혔다. 델라 산티나 교수는 “기계적 기능과 인지 기능을 모두 향상시킴으로써 보다 효율적일 뿐만 아니라 복잡한 환경에 대한 적응력이 뛰어난 4족 보행 로봇을 개발하는 것이 목표다”라고 말했다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 印 Ati모터스, 세르파 AMR 2종 공개 (0) | 2025.03.31 |
|---|---|
| 美 다이나 로보틱스, 저가 로봇에 체화되는 AI 상용화 자금 344억원 유치 (0) | 2025.03.31 |
| "마침내 자동화 MFC 시대가 오고 있다" (1) | 2025.03.31 |
| 中 딥로보틱스 '응급 구조 및 이송' 4족 보행 로봇 공개 (0) | 2025.03.31 |
| 中 타스, 임바디드 인텔리전스 역대 최대 규모 '1700억' 엔젤투자 유치 (0) | 2025.03.31 |