▲아이보가 조용히 걷는 법을 학습하고 있다.
스위스 취리히연방공대(ETH Zurich)와 소니그룹 공동 연구팀이 소니의 로봇 애완견 ‘아이보(Aibo)’의 능력을 확장할 수 있는 새로운 강화학습(RL) 모델을 개발했다고 테크엑스플로어가 4일(현지 시각) 보도했다.
이 모델은 아이보 로봇이 조용히 걷고, 자연스러운 춤 동작을 수행할 수 있도록 설계됐다. 이번 연구 성과는 출판전 논문 공개 사이트인 ‘아카이브(arXiv)’에 2편의 논문으로 소개됐다. (논문 1 제목:Learning Quiet Walking for a Small Home Robot, 논문 2 제목:DFMㆍDeep Fourier Mimic for Expressive Dance Motion Learning)
논문 제1 저자인 와타나베 료는 ‘테크엑스플로어‘와의 인터뷰에서 “아이보 사용자들은 로봇이 집안을 돌아다니면서 내는 발자국 소음에 민감했다”면서 “물리적 시뮬레이터에서 발 접촉 속도를 최소화함으로써 조용한 보행을 성취할수 있 는 ’심-투-리얼(sim-to-real)‘ 기반 강화학습 방식을 설계했다”고 밝혔다.
이 모델은 아이보 발 하단에 부착돼 있는 센서를 통해 수집한 데이터를 바탕으로, 소음을 유발하는 빠른 발 동작에 점진적으로 페널티를 적용하는 정책을 채택하고 있다.
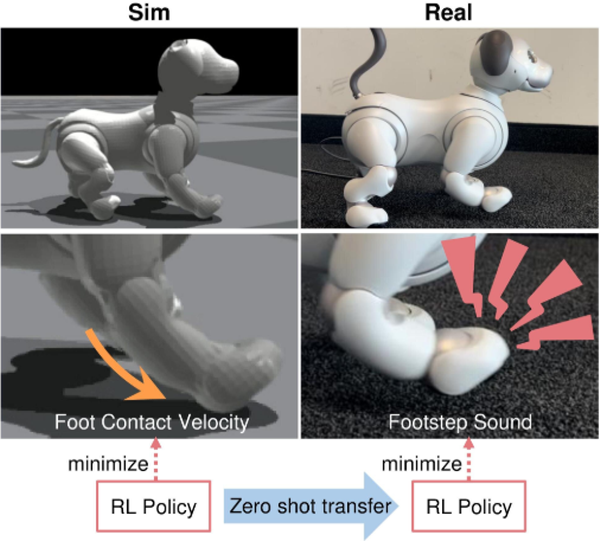
▲ 연구팀은 아이보의 보행 소음을 줄이는 모델을 개발했다. (이미지=취리히연방공대 및 소니)
연구팀은 새로운 모델의 성능을 평가하기위해 기존의 RL 기반 방법과 현재 소니에서 사용하고 있는 컨트롤러를 활용해 이동 시 발생하는 소음 수준을 비교했다. 실제 아이보가 평지와 경사지를 이동할때 소음 수준을 비교한 결과 새로운 접근 방식의 소음 수준이 가장 낮은 것으로 나타났다.
와타나베는 "우리의 이동 컨트롤러는 로봇이 걷는 동안 로봇 발생하는 소음을 크게 줄여주며, 소니와 기존 RL 컨트롤러 보다 훨씬 조용하다는 것을 발견했다“고 말했다.
연구팀은 아이보의 엔터테인먼트 기술을 개선하는 데도 노력했다. 이를 위해 모션 표현(motion representation)과 강화학습(RL)을 결합하여 보다 자연스런 춤 동작 루틴을 만들 수 있는 ’DFM(Deep Fourier Mimic)' 모델을 개발했다.
와타나베는 "엔터테인먼트 로봇이 다양한 예술적 동작을 실행하는 것은 디자이너에게 시간이 많이 걸리는 일이고, 일반적으로 단순한 동작 재생에 국한된다. 이에 반해 DFM은 엔터테인먼트 로봇이 가능한 한 예술적 동작을 모방할 수 있도록 해준다"고 말했다.
연구팀은 새로운 춤 동작 정책을 적용함으로써 보다 부드럽고 자연스러운 동작을 수행할 수 있다는 것을 보여주었다. 아이보는 사용자와 새로운 방식으로 상호작용하며 춤 동작을 모방할 수 있다.
와타나베는 "우리가 개발한 춤 정책은 참조 동작을 추적할 수 있을 뿐만 아니라 다양한 동작 모드 간 전환도 자연스럽게 수행한다"고 말했다. 이어 ”새로운 접근 방식이 아이보뿐 만아니라 다른 가정용 로봇이나 테마파크의 엔터테인먼트 로봇 시스템에도 적용될 수 있다“고 덧붙였다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'인공지능' 카테고리의 다른 글
| 프로메디우스, 골다공증 진단 보조 AI SW 국내 허가 획득 (0) | 2025.03.13 |
|---|---|
| 세이지-지에스아이엘, 스마트 안전관리 시스템 고도화를 위한 업무협약 (0) | 2025.03.13 |
| [K-휴머노이드 로봇] "온디바이스 AI NPU 각광 받을 것" (0) | 2025.03.04 |
| KAIST, 스스로 가설을 세워 검증하는 뇌 기반 AI 기술 (0) | 2025.02.27 |
| "로봇, 거울에 비친 자신의 모습을 보고 학습한다" (0) | 2025.02.27 |